Salut la commu !
Je m’appelle Josselin et je suis nouveau dans ce milieu du skate électrique. Passionné de skateboard (de longboard plus précisemment), mon coté bidouilleur m’a poussé à m’aventurer du coté des boards électriques.
Après avoir présenté un projet à mon école d’ingénieur, celle ci m’aide financièrement à créer mon skate électrique.
Cependant, le but de mon projet est de réaliser le skate, pas simplement d’acheter les composants et de tout monter. J’ai un budget d’environ 700 euros. Ce qui m’embête le plus c’est la partie électronique. J’aimerais savoir s’il y a des tutos de comment réaliser sa propre télécommande ou comment assembler son propre VESC, idem pour l’assemblage de la batterie, je ne sais trop par où commencer
Pour la partie moteur j’ai quelques questions, notamment s’il faut privilégier un ou 2 moteurs. Et quel moteur me recommandez vous ? En sachant que je compte mettre des moteurs courroies.
Je vous remercie d’avance ![]()
Salut mec, je vais faire au mieux pour te répondre sur les sujets que je maitrise un peu.
Déjà je trouve super que l’école paye, 700E par étudiant je sais pas combien y’a de personne ou groupes mais ça doit faire un sacré pack de thune a sortir, tu pourrai donner le contexte du projet / attentes de l’école / déroulement idéal des étapes. Ça n’a évidement que peu a voir avec le sujet mais je suis juste curieux ![]()
-
Fabrication de télécommande. Ces trucs la coutent littéralement 20 balles (même gratuit si tu te démerde pour choper une vielle nunchuk de wii) , je ne connais personne qui ai pris la peine de ce faire « chier » pour si peu alors je ne saurais pas en dire plus.
-
Assemblage vesc. Le vesc etant un ESC open source, tu aura peu de mal a trouver la liste des pièces, des schéma de PCB. Il a moult ressources en ligne, je pense notamment a la très bonne vidéo de great scott
-
Assemblage batterie. La que ce soit en théorie ou en pratique il y a vraiment beaucoup a dire. Pour approcher le sujet et pouvoir te lancer dans les questions orienter je pense que c’est une bonne idée d’aller sur YouTube (c’est une playlist).
-
Un ou deux moteurs. Je serais tu genre a toujours privilégier deux « petit » moteur plutot qu’un « gros ». La planche est substantiellement plus agréable et capable de deux roue motrice, la double surface de contact y joue pour beacoup car peu importe comment tu te tiens sur la planche la puissance a l’acélération et au freinage va passer au sol ce qui n’est pas le cas en mono-moteur, même en petite puissance. Le dimensionnement c’est compliquer de m’avancer ici, dans un petit budj’ comme le tiens je pense que rester en « petit » brushless 50-55,54,48,44,quelquechose dans les 150-200kv serait suffisant.
Merci beaucoup pour ta réponse cathode !
En fait l’école finance à hauteur de 500 euros et moi je compte y rajouter au minimum 200 euros de ma poche.
Le projet consiste à créer un skateboard électrique qui est compétitif, c’est à dire que pour le même prix face à skate R2R il est plus performant.
Je vise d’atteindre les 35 km/h sur route avec ce setup. En sachant que je pèse 78Kg.
De plus, le second but du projet est de faciliter la reproduction de ce skate. C’est à dire que je vais filmer, ou laisser une trace écrite conséquente facilement compréhensible par quelqu’un qui n’a pas de compétence en électronique particulière pour que lui aussi puisse reproduire ce skate.
Il faut également que le skate soit réalisé avec le plus de composants « standards » c’est à dire pas que j’achète du moteur d’occasion quasi introuvable ou alors éviter les commandes très spécifiques sur des sites un peu douteux (et ainsi faciliter la reproductibilité)
En sachant que l’intérêt de projet est aussi de me faire progresser en électronique.
Pour en revenir au skate, avec un tel budget, aurais tu des suggestions à faire en matiere de moteurs et de VESC ?
Alors, en pièce individuel il est impossible de conseiller quoi que ce soit tant que l’on sait pas de quoi on parle.
En terme de méthodologie je pense qu’on fera jamais mieux que but /principe/mode opératoire/résultat/conclusion et je pense aussi que c’est ce qu’attend l’école alors ce sera pas perdu. Le but est dégrossi mais pas encore très solide, le choix de moteurs spécifiques viendra dans les principes.
Pour finir de bosser le but du projet je pense utile de mieux définir le cahier des charges vis a vis du budget. Dans les 700E, ta une belle exway/meepo, ça tape les 45 sur 20km, ya rien dedans et c’est les même pièces depuis 10 ans donc l’entretien coute rien, c’est dignement fiable et les finitions sont acceptables. Pour être honnête ce sont de sacré concurrents et un beau challenge de vouloir faire mieux/aussi bien.
Selon moi il va falloir choisir ces combats, c’est pas possible de faire mieux en tout point. Ton choix de ne pas bosser avec des hub démontre une volonté de faire dans la « performance » pourquoi pas.
Si je continue d’extrapolé et que j’inclu les volontés d’avoir un ensemble : « reproductible/facilement réalisable/facilement réparable » alors voila ce que j’en pense …
- Lipo, 10S, en deux fois 5S, dans les 5000-8000mAh. Ca coute rien, ca décharge fort, c’est formidablement facile a utiliser mais il faut le chargeur qui va bien
- Un (ou deux ?) mini vesc de ce style. C’est suffisant. Le même genre de vesc que la vidéo de great scott. Bravo a toi si t’arrive a assembler ca en DiY, comme ta pu le voir c’est quand même un petit bordel.
- Ces 5054 en 200kv sensored bien réduit a la transmission ca sera digne, ils sont commun et coutent rien.
Mais la clef de voute de mon idée et ce qui va le rendre acceptable pour les profs c’est que j’ai en tête de tout imprimer en 3D. Les boitiers, les couronnes, possiblement les mounts et des cales pieds seront 3D printé et tu donne les fichiers avec la board, ça permet de cocher les cases « facilement réalisable/facilement réparable » (facilement upgradable aussi). Ca va te simplifier la vie comme jamais sur la réalisation et te donner un angle d’attaque pour justifier tes choix.
Pardon pour les fautes j’ai écrit tout d’un coup et j’ai pas pris le temps de me relire.
Edit, petit calculateur pour estimer tes ratio et ta Vmax : http://calc.esk8.it/ non pas que ce soit difficile a faire a la main mais on est tous flemmards ![]()
ça coute cher un Vesc ![]()
possible d’en créer un soi même ? Avec de l’arduino, et ESC basique (de modélisme ) ?
Ou tout en diy avec des relais
maintenant ça me demange trop d’aller en école d’ingenieur ![]()
Ce que tu me présentes me plaît bien, ça entre bien dans mon budget en plus.
Je pense effectivement faire le plus de choses en 3D, pour tout ce qui est pignon pour la transmission du moteur je pense le réaliser aussi dans l’atelier d’usinage de l’école, pareil pour le support du moteur. Il n’y aurait que la courroie qu’il faudrait que je commande du coup.
Pour le boîtier, en quelle matière me recommandes-tu d’imprimer pour la 3D, parce que j’imagine que ça va beaucoup chauffer.
Mais j’ai cru comprendre que le rendement des moteurs brushless sont meilleurs lorsqu’ils tournent à haute vitesse, il va donc falloir que je me penche sur mon rapport de réduction. Surtout que si je réduis trop mon rapport, j’aurais une Vmax assez faible.
Aurais tu des conseils ou des ressources la dessus ?
En arduino c’est « facile » de gérer des petit signaux, mis a amont d’un boitier relais pour mettre un peu de puissance tu va arriver a piloter des petit moteur DC de 700-1000W mais pour piloter en puissance des moteurs BLDC de 6kW qui tournent a 30 000rpm il faut un vrai esc. (ou du moins l’effort a fournir ne vaut pas le prix du vesc)
Oui effectivement l’arduino c’est cool mais quand on parle de courant qui dépasse le 10A ça devient tendu de faire à bas prix. Il me reste donc le problème de la batterie que je dois gérer, et aussi de la télécommande
D’ailleurs pour être certain, le vesc ne possède pas d’anti spark ni de BMS ?
Certain vesc ont un antispark, par contre le BMS n’a rien a voir avec le VESC, au mieux il va communiquer ces datas en can-bus ou UART mais il reste coté batterie.
La fiabilité incarnée en terme d’interrupteur on.off c’est le « loopkey » en xt90s
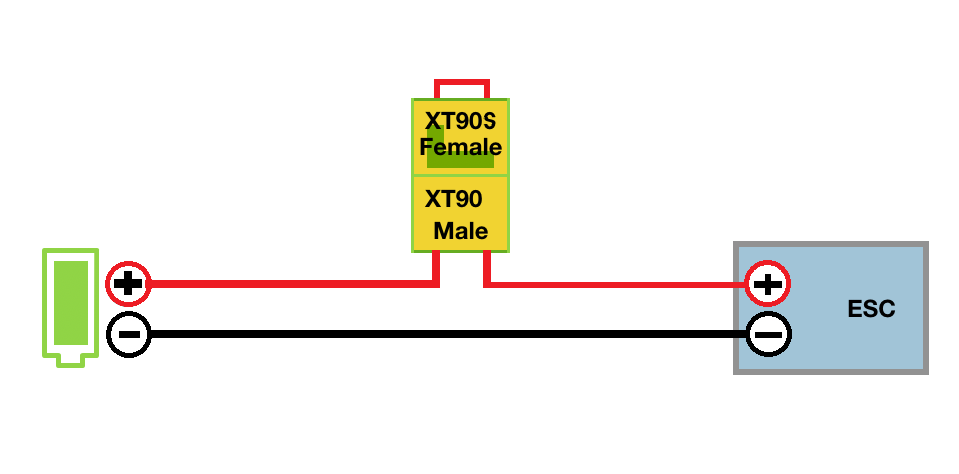
Il faut l’intégrer correctement autrement c’est pas super sexy je te l’accorde.
Je te répond sur les rapports de réduction et autre KV moteur dans un petit temps
Je vois, donc pas besoin de lâcher 40 balles dans un anti spark de compétition, ce seul petit montage suffirait.
Concernant le bms, il est quand même nécessaire d’en mettre un pas vrai ?
Je voudrais savoir ton avis également sur ce VESC que j’avais vu précédemment
Beaucoup de VESC marquent comme ici « VESC Sensor Wires » mais on est bien d’accord qu’ils embarquent qu’un port mais que j’ai besoin d’acheter le sensor à connecter à la carte
Ou alors le sensor est déjà présent et je dois juste acheter la télécommande ?
Alors,
Déja si ya moyen d’usiner alors c’est jackpot. Pour information le standard en courroie sk8 c’est l’HTD5M. Sur des petites puissances comme ça 6mm de large c’est suffisant et autant de masse en moins.
En plastique d’impression je suis un fan de l’ABS ou ASA, ça se ponce bien ça se découpe pas mal, ça se colle bien a pas cher avec du « jus d’ABS » (sauce semi-liquide acétone + ABS en solution), ca prend bien les couches de fibre défois que tu veuille faire du composite dessus, ça tiens « bien » les UV et la température. PETG pas mal mais pas collable et dans le pire des cas PLA qui s’imprime et colle dignement mais c’est tout.
Déjà j’imagine que ta vu quelques vidéos de la playlist de bricolage c’est cool sur les batteries pour te donner une base, je vais m’en servir dans mes explications.
Le BMS est nécessaire en lihium ion/LiFePO4 que ce soit en décharge+charge ou en décharge uniquement. C’est tout a fait possible d’en poser un sur assemblage de pouch cell LiPo mais dans la mesure ou ces packs sont penser pour être brancher a un chargeur de modélisme (qui n’est rien d’autre q’un BMS « externe ») c’est dommage de s’en privé car cette simplicité d’utilisation est une de leur force. Un chargeur de modélisme c’est 25 euros du leboncoin,c’est utilisable sur n’importe quel lipo sous 6S ça évite de devoir acheter une alim et faire tout son pack en li-ion si ça te faire peur. Par contre, ca implique de démonter ou manipuler des câbles a chaque charge ce qui n’est pas adapté a ce que tu veux faire et un manque de classe.
Les vesc supportent tous les sensors a effet hall mais c’est au moteur de les avoirs, la prise vesc est en JST-pH2 pour info. Libre a toi de gérer les moteurs sensored ou sensorless, il n’y a pas de mauvais choix a faire sur la question. Moyennement un petit push au pied sur le démarage pour générer de la back EMF et permettre au vesc de synchro le sensorless c’est plus fiable car ca revient tout simplement a virer des capteurs qui autrement serait susceptibles de lacher (en plus sa soulage la batterie). Sensored ca drive n’importe quand mais si les sensors crames ou chies en ride, c’est chiant.
Pour la théorie sur les moteur BLDC j’ai lu quelques trucs ( a ouvrir avec sci-hub)
C’est pas mon domaine alors je ne fait qu’essayer de comprendre :
- Ils expliquent tous que au démarrrage ya full couple electrique et un rendement bon mais pas optimal, le rendement optimal s’obtient on va dire a mi puissance et mi régime car aprés coup le couple electrique et le rendement s’effondrent avec le régime.
- Ensuite je sais que le couple moteur et égal au régime x la puissance, donc plus sa mouline plus on est content.
- Ensuite haut KV physiquement parlant c’est relatif au diamètre du fil de cuivre utilisé sur le stator et au nombre d’enroulements donc plus ya d’enroulements plus ya de KV, plus ya de cuivre, moins ya d’effet joule, moins ya de chauffe cequi fait plaisir au rendement en sois, moins ya de résistance et au final plus ya de marge pour balancer de l’ampérage. L’ampérage c’est important car c’est lui qui crée le champ magnétique et donc qui va « gripé » les aimants du rotor
Si on regroupe ces trois points alors il apparait que le moteur « idéal » est un moteur a moyen-haut KV et qu’il faut l’utiliser dans les 3/4 de son régime avec un max d’ampérage pour un objectif d’equilibre thermique dans les 40-60°C.
Sachant que plus ta te Vmax moins ta d’acélération et inversement, ma méthode consiste donc a prendre le calculateur que j’ai link, me fixer mon régime via une Vmax (perso je commence a trembler vers 45km/h) et chercher un moteur avec un bon KV sans avoir a mettre une couronne qui va toucher la route coté roue ni avoir genre … 2 dents coté pignon autrement la courroie va faire que sauter. Il apparait que 160-200kv est un bon compromis.
C’est ok mais suis pas un gros fan des doubles vesc, c’est plus chiant a réparer si y’en a un qui crame. Je préfère avoir de la redondance et prendre deux singles brancher sur un même récepteur, fiabilité.
et des petits sk3 turingy en 150kv?, ils sont sensors less mais ca cog pas beaucoup. et ça envoierait de la patate/ comparer a des wowgo
j’ai corrigé le kv ![]()
par contre j’avais un souvenir a 50€ piece ![]() la c’est le double…
la c’est le double…
les 6364 190kv tu veux dire ?
Effectivement ils sont bien surtout avec ca mais 6364 c’est gros pour du street . Il faudrait faire un setup en diagonal, ca me ferait très plaisir de (re)-voir ça car c’est quand même un délire, dommage que ce soit surtout pas pratique en plus d’être deux fois plus cher sur un dual de 5054.
Toujours est t’il qu’avec le vesc qui va bien et une 12S capable de 150-170Amps sur un ratio bien réduit, ca va faire un dragster <3 0 a 50 sous les 2 secondes avec le pti bruit de fusée qui va avec, les profs vont parler chinois ![]()
Normalement il y a possibilité d’usiner, mais il faudrait que je vois avec les profs car je ne sais pas trop comment faire.
Pour le capteur je parlais du capteur de réception du signal de la télécommande, je cherche à comprendre si le VESC sait recevoir le signal ou si je dois acheter le capteur à brancher au VESC.
Pour les batteries, j’en vois pas mal à des prix tous très différents, pareil pour les bms, tu aurais des modèles de chaque dit de « valeur sure » ?
Concernant les print en 3D, je vais certainement imprimer à l’ABS
Pour savoir combien crache la batterie, il faut utiliser la dénomination 50C par exemple ? C.a.d si la batterie fait du 5000mAh en 50C elle crache du 250 Amps en théorie ?
Enfin, oui je cherche à ce que recharger le skate soit facile, il faut donc que je trouve un moyen de recharger le skate juste en le branchant sur secteur, tu as quelques idées ?
Le vesc s’attend a recevoir un signal en PPM par la remote, rien ne t’empêche de le piloter de 0 a 3.3/5v via les entrées ADC en généralement au nombre de 2.
La meilleur batterie c’est celle que tu te fabrique, ya plein des ressources a ce sujet et je t’en ai déjà linké. Autrement ca s’achete mais ce sera ou trés cher ou de la merde, ou les deux.
Ta un soudeur par point a l’ecole ? Tu te sens d’en fabriquer un ? C’est pas dur en vrai, ya plein d’option pour ca.
5000mAh, 50C, 5*50 = 250A ouai aprés c’est la théorie, en pratique c’est juste de l’effet joule et de l’energie donc fonction de la résistance interne et du temps de la décharge. 250A pendant 0.1s oui mais 250A pendant 5H, a voir selon la température quoi.
Possible qu’on ait ça à l’école, je demanderai, mais oui sinon j’essaierai de me renseigner pour en fabriquer/procurer un. Et j’essaierai de faire moi même ma batterie avec les ressources que tu m’as donné.
Niveau bms tu as quelques conseils à me donner ? Ou quelques ressources sympas à regarder ?
Par contre pour cette histoire de télécommande j’ai toujours pas compris
Surtout que j’aimerais quand même fabriquer la mienne ![]()
les bms rouge daly fonctionne bien regarde sur Aliexpress
Je pense que je vais réaliser cette télécommande, par contre ce que j’ai compris, les VESC ont une prise pour brancher le capteur qui reçoit le signal de la télécommande, tu aurais (ou cathode) une référence de capteur qui reçoit le signal pour ce type de télécommande ?
Ce sont generalement des circuits NRF 2.4Ghz qui peuvent sortir un signal ppm,pwm ou uart . Mais il faut les programmer…