pas la moindre idée ! c’est un truc que j’ai depuis qqs année , je l’avais choisis pour ses roue sois disant TT a l’epoque et donc annoncé un peu plus puissant mais j’en sais pas plus … après il marche assez bien mais j’ai pas aimé le coté casse gueule du truc sur tout que chez moi c’est pas terrain lisse , du coup il traine et me saoule dans le garage et autant dire vque les enfant y pensent meme plus depuis qu’ils ont une syl !
idée surement à la con : couper un base plate en travers pour reprendre l’autre par l’exterieur de part et d’autre et assembler les deux demi base plate au deck moyennant renfort carbone et 4 autres trous a placer pour stab et renfort … ca donnerai une possibilité de positionnement libre du ressort
oui je me suis dit entre temps que tourner tete beche les deux demi et reprendre par l’interieur serait mieux mais plus de metal a tarauder en face du ressort … peut etre une petite traverse a integrer au montage
et oui l’hoverboard c’est marrant , mais casse gueule au moindre obstacle . beaucoup plus que la onewheel . d’ailleurs j’ai un esc d’hoverboard que je vais convertir en onewheel avec un double hub au milieu … ça sera l’occasion d’un nouveau thread
purée ! j’adore l’idee ! le onewheel me faisait juste ment de l’oeil depuis que j’en ai croisé un en mtb sur piste verte … de loin je croyais au debut que c’etait une autre mtb ! ça avait l’air excellent a rider
j’ai essayé que des clones chinois pour le moment … mais quand je vois certains riders en TT sur des vraies , c’est tentant . en fait tout est dans le soft . . la gestion du gyroscope , le comportement sur un obstacle …
je vais essayer de regrouper les sideboard d’ l’hoverboard pour mutualiser les gyroscopes et assurer l’equilibre avant/arriere . et accoupler 2 hubs pour mettre un gros pneu …
bah je vais suivre ça
oui la position des pieds change tout finalement pour lea gestion de l’equilibre par rapport a l’hoverboard ! ça parraissait super fluide la facon dont le gars ridait !
je pense repercer un trou de 5 à coté du gros de 6 ou 8mm je sais plus . et pas besoin de vis de réglage , j’utilise des barrels en elastomere . eventuellement fraiser la baseplate, qui as une excroissanceau niveau du ressort…
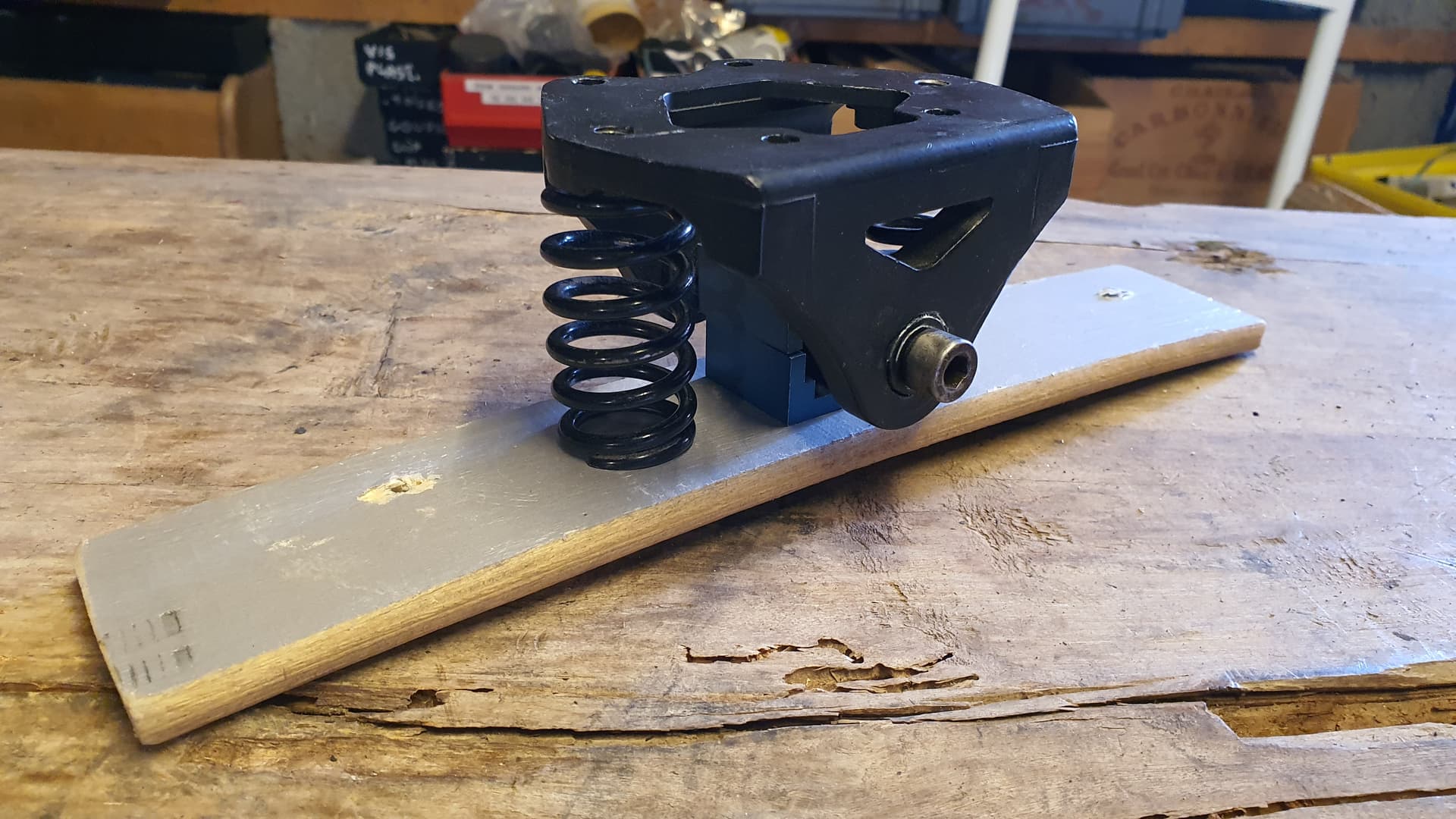
Quite a utiliser une lame de composite, on peut s’éviter un des 2 hangers … il suffit de faire une chape en alu vissée sur la lame …
Facile : un carré d’alu percé a 8mm
à vide , on sent bien la différence entre sensorless et sensored …mais dans ce dernier cas , ce n’est plus du foc comme sur les esc 6~10s ,mais un mode pseudo sinus , un poil plus bruyant … comme sur un esc Ecomobl ou Propel testé il y a prés d’un an .
mais ça reste très discret …
en tout cas , il n’y a plus le coup de raquette à la ré-accélération après une roue libre au dessus de 10~15 kmh qui est franchement pénible voire dangereuse , et que j’avais réussi à atténuer , mais pas éradiquer .
test ride imminent … et dans la foulée , réduction des shunts bien sur
Je testerais aussi avec des hubs en 4 fils,pour voir si le freinage a été amélioré (frein limite faible avec les lingyi 10s)
et ça ouvre la voie à du 13 ou 14s … mais ce sont des mosfets 68V/70A qui vont être limite…
Et a la demande generale je rapelle le prix exorbitant d’un build en hub :
Mtb (pour deck et train avant) 50€ sur lbc
revente du train arriere -40€
2 hubs 50€ voire moins
2 pneus 50€ ali
Truck arriere 50€ ali
Esc 60€ ali
Un peu plus de 200€ … reste la batterie qui peut plomber le budget …
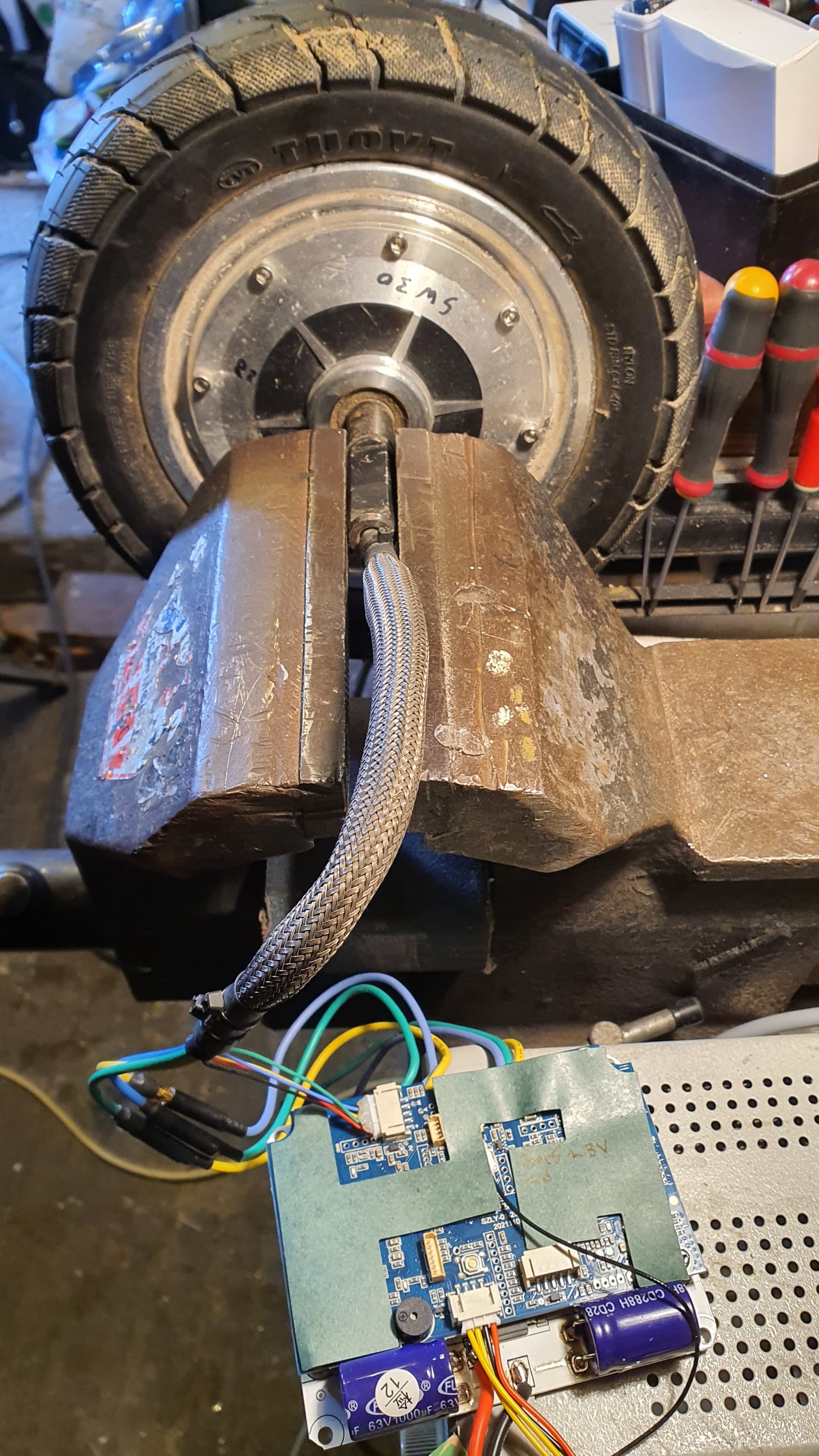
alors nativement , l’esc est bridé à 43A … c’est mieux que les 20~25A des versions génériques précédentes , mais je vais augmenter un peu .
en sensored , on n’est pas en FOC , mais sinusoidal . c’est toujours mieux que le bldc en sensorless , mais ça fait quand même du bruit de commutation . j’ai l’impression d’avoir des courroies… un peu déçu .
comme toute commutation en bldc . les mosfets sont commutés différemment et c’est bruyant .sans les capteurs hall , le cpu doit mesurer des choses sur les phases aux etats bas des mosfets . comme un vesc . on l’entends d’autant plus sur des hubs que sur des SK8 courroie/chaine ou le bruit est plus masqué …
Mouai,
Du hub d’eskate au gros QS205 en passant par du générique 1500W, moteur de m365 ou mxus 3kW, du minuscule 0802 a 5g de drone au 120100 de paramoteur avec ces 4 kilos sur la balance, que ce soit en fardriver en vesc en yuyanking en sabvoton, ca n’a jamais claqué comme ca.
c’est le code lingyi bdlc qui génère ça .par contre en Foc c’est parfait … essaies avec un vesc . entre Foc sensored et BLDC sensorless… ça fait pareil .