yes . mais le démarrage en charge est vraiment pénible , un cliquetis à chaque accélération , et le couple/vitesse n’est pas constant . contrairement au foc … tu démarres péniblement au courant max ( déterminé par le mode remote et la valeur des shunts) ensuite le moteur à un meilleur rendement , donc tourne plus vite et tu dois réduire les gazs …
T’as pas fait une vidéo avec Hall et après les avoir débranchés pour voir la différence ?
1 « J'aime »
c’est la vidéo ci dessus … avec et sans hall .
apparemment , ces esc peuvent fonctionner avec 1 ou 2 hall en fail safe … jamais essayé …
Je viens d’essayer rapido car dans mon atelier ils fait -1… ![]()
Moteur hub d’un des Hummer et un des Lingyi 4WD sans les hall car le connecteur hoverboard n’a pas le meme pitch ( je vais le changer asap ) et bien ça tourne super smooth sans aucun craquement … En mode « Pro » presque impossible de bloquer la roue alors qu’en low c’est très facile.
Je ferai une vidéo à l’occasion
C’est pas un des Lingyi du 4WD que tu as utilisé pour cet essai , non?
non . un lingyi générique . c’est ce que je constate sur la plupart de mes hubs : en bldc sans les hall, c’est bruyant a fort courant, ça cogge et décroche sur une forte retenue au démarrage .les esc du kit 4WD ont le même comportement …celui là programmé nativement en 12S et sans mode Foc a le même comportement . même en sensored .
Possible de tester avec des hubs qui ont plus de poles ? Tous le hubs se valent terme de slot. et de poles ?
plein de variantes , mais tout les brushless que j’ai essayé en bldc font un sale bruit…
Tu as raison c’est inévitable. C’est pareil avec les inrunner d’efoil, le BLDC c’est saccadé et tout le monde utilise le mode FOC. Pas de hall par contre sur ces moteurs inrunner de foil juste les trois phases …
Sensorless foc:
Pourquoi les fabricants de l’empire du milieu ne programment pas leur FW en Foc ?
intéressant ce pdf .
pour du foc , il faut une certaine puissance de calcul . donc oublies les contrôleurs cheap à cpu 8 bits .
après beaucoup fonctionnent en Foc … plus ou moins bruyant . même avec un vesc j’avais des bruits de commutation sur un fort appel de courant et en freinage .j’ai des esc hobbywing en foc un peu bruyant , le contrôleur de ma xiaomi m365 aussi .
Seul ces esc lingyi font du foc sans bruit trop audible, je sais pas pourquoi . le code est différent . on entend un léger bruit sur un fort courant , mais très lissé et vraiment faible par rapport aux autres… j’ai surtout essayé mes hubs , je veux pas faire de généralité .
c’est lié aussi aux valeurs R et L des bobinages , à la puissance des aimants …
Verrue en place
ça force l’esc à envoyer une modulation minimum après avoir relâché l’accélérateur , pour éviter un coup de raquette en FOC sensored à la re-accéleration après une roue libre en 12s … voire parfois en 10s à full batterie … content , ça fonctionne bien .
4 « J'aime »
oula
tu veux le schema ?
va y pour le schéma a y être XD
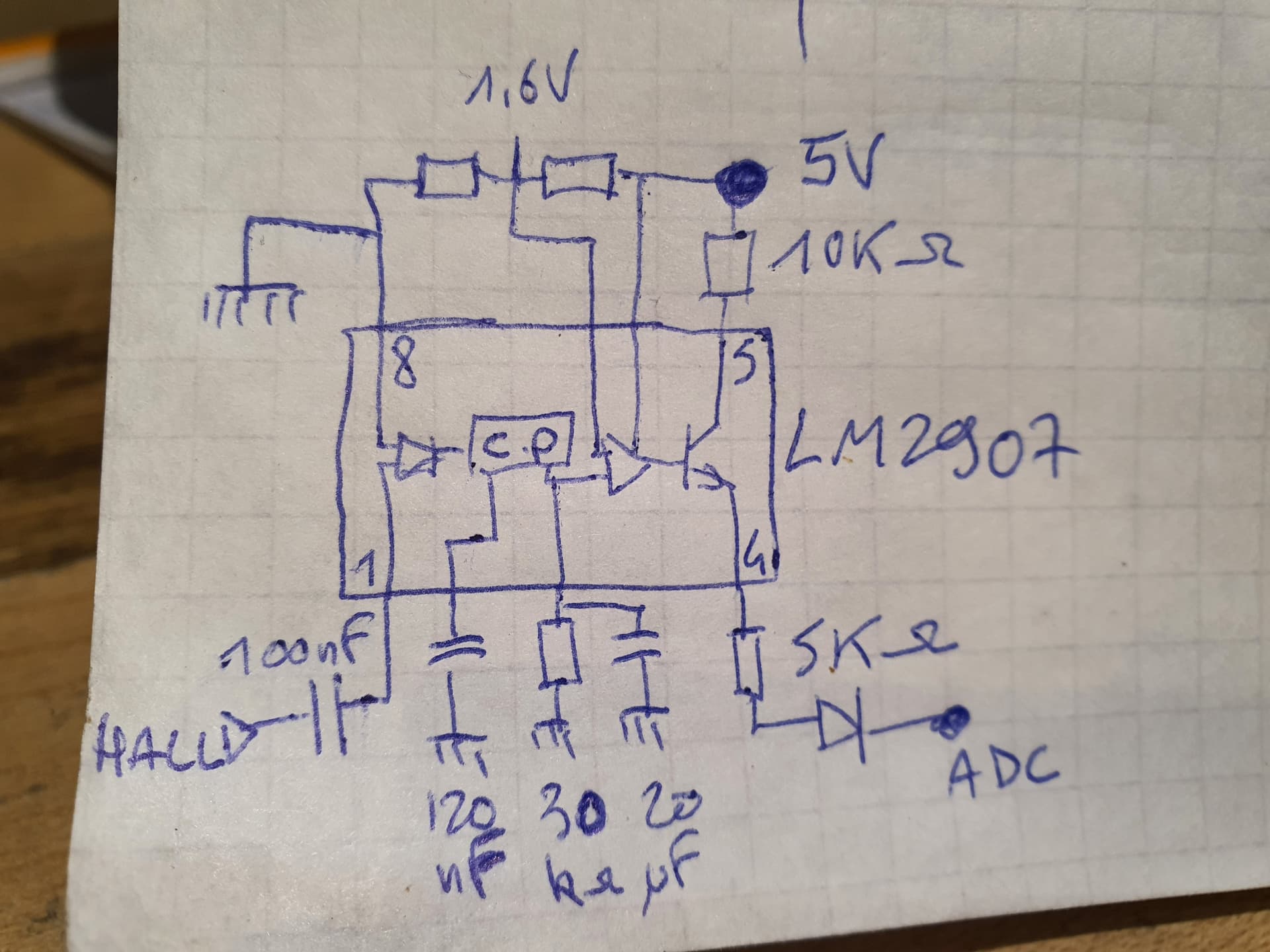
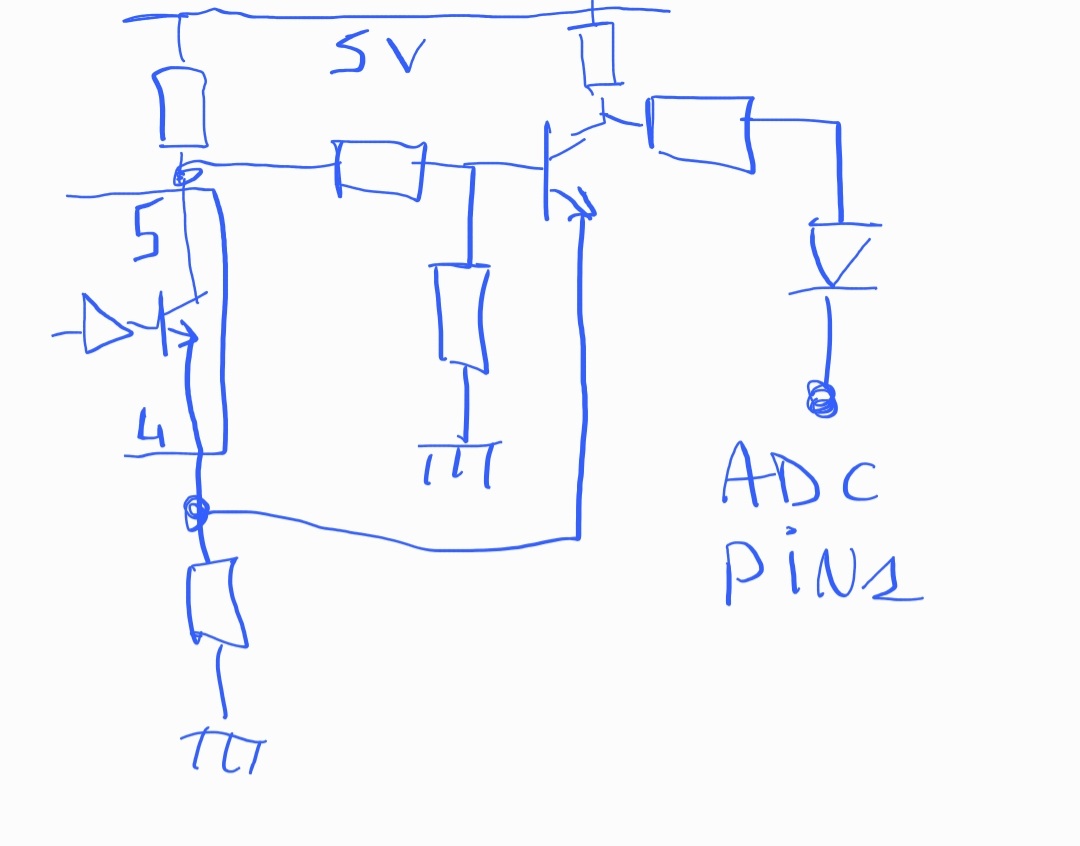
c’est un convertisseur fréquence/tension LM2907 basique .
au dessus d’une certaine vitesse moteur (=fréquence du signal d’un hall) , ça envoie 0,4~0,5V sur l’entrée ADC du lingyi(0 à ~4V a fond), pour éviter que le CPU arrête d’envoyer du signal sur les phases après ~1s , et éviter le coup de raquette déstabilisant quand il rétablit le signal en accélérant .
du coup on a une reprise d’accélération désormais smooth et aussi puissante qu’avant . ![]()
1 « J'aime »
ça fonctionne tellement bien que maintenant ,quand je pars en roue libre dans une descente , j’ai un petit coup de raquette quand je dépasse les 10Kmh ![]() … modif en cours …
… modif en cours …
Après mesure ,il.ne faut pas que le systus demarre en descente tant que je n’ai pas mis un coup d’accélérateur…que je viens de mesurer à ~1V sur l’entrée ADC.

Avec un trigger de schmidt : à la décélération, ça maintient 0.4V tant que je ne suis pas sous les 10kmh . Et ca n’applique pas les 0.4V Si dépassement des 10kmh en roue libre en descente, sauf si j’accélère et applique au minimum 1V sur l’entrée ADC . Calcul des composants en cours …1 totor et qq resistances en plus.
1 « J'aime »
Là c’est du grand art Professeur Lurch! …![]()
1 « J'aime »
Je contourne l’impossibilité ( officielle) de discuter avec les lingyi … aucune doc sur les Uc …c’est surement des copies de STM32 ou autre ARM , mais aucune info . et ils sont surement claqués en lecture/écriture .bien que si je m’énerve , en branchant un st-link ou usb ou uart ou spi sur le port com disponible , y’a peut être moyen de causer avec lui . mais j’aime pas m’énerver , et le numérique non plus … ![]()
ceci dit , il me reste un ‹ vieux › Lingyi de ActonBlink , qui a une interface bluetooth . mais un code BLDC dégueulasse . un peu de rétro-ingeniering permetrait de percer qq secrets … mais bof …
aller tripoter du code , c’est un métier. et un code Foc , c’est une vraie usine à gaz mathématique … celui la fonctionne vraiment bien , tolérant avec pleins de moteurs , j’y touche pas …
1 « J'aime »