à l’avenir je mettrait aussi 2 hubs à l’avant, pour aller plus vite
tu n’ira pas plus vite . même avec 8 hubs .
sans augmenter la tension, tu ne peux pas le faire aller plus vite .un moteur a une limite physique , c’est son Kv.
Kv de 18 avec 40V , ça fait 720tr/min à vide. disons 700tr/min. en charge.
avec une roue de 20cm de diametre, 26kmh batterie pleine , et 22 batterie presque vide …
pour aller plus vite : pneus plus grands , batterie 12s ou plus , ou du field weakening . certains controleurs le font , nottement en vtt elec et scooters , mais pas encore au point en skate …
si j’augmente l’ampérage, ça ira ? c’est possible de modifier L’esc
la modif des shunts te donnera plus de nervosité au démarrage , plus de vitesse mais que en cote raide où tu es au taquet du courant . sur le plat , tu es limité par le Kv des hubs .
tu peux aussi modifier l’esc pour passer en 12s , ça fonctionne très bien sauf des a-coups parfois déstabilisants à la re-accelération après une roue libre . ça n’arrive pas si tu as toujours un peu de gaz sur la remote . faut prendre l’habitude … mais je suis sur le coup pour une modif qui résoud le problème…

Réduction du shunt à 3mOhms …test demain avec les 10’’ 4fils/petits aimants …Vmax, Vmax,freinage,Ah/km… comme dab
.
1 « J'aime »


lurch le sorcier de l’esc chinois dégeulasse qui continue de faire des dingueries, toujours un régal.
3 « J'aime »
dégueulasse toi même 
j’en ai un qui bronche pas en 10s à 2x40A sur l’autre build,
plusieurs qui se suicident en CC sur des puces … 
-Le 12s reçu de Propel avait un comportement étrange dès la réception , il ne tenait pas compte des halls , et signal trapézoïdal bruyant … au 1er ride , bip à la moindre accélération et suicide  . Je négiocie avec Propel , mais c’est des purs chinois durs en affaire qui ne veulent rien entendre … a suivre…
. Je négiocie avec Propel , mais c’est des purs chinois durs en affaire qui ne veulent rien entendre … a suivre…
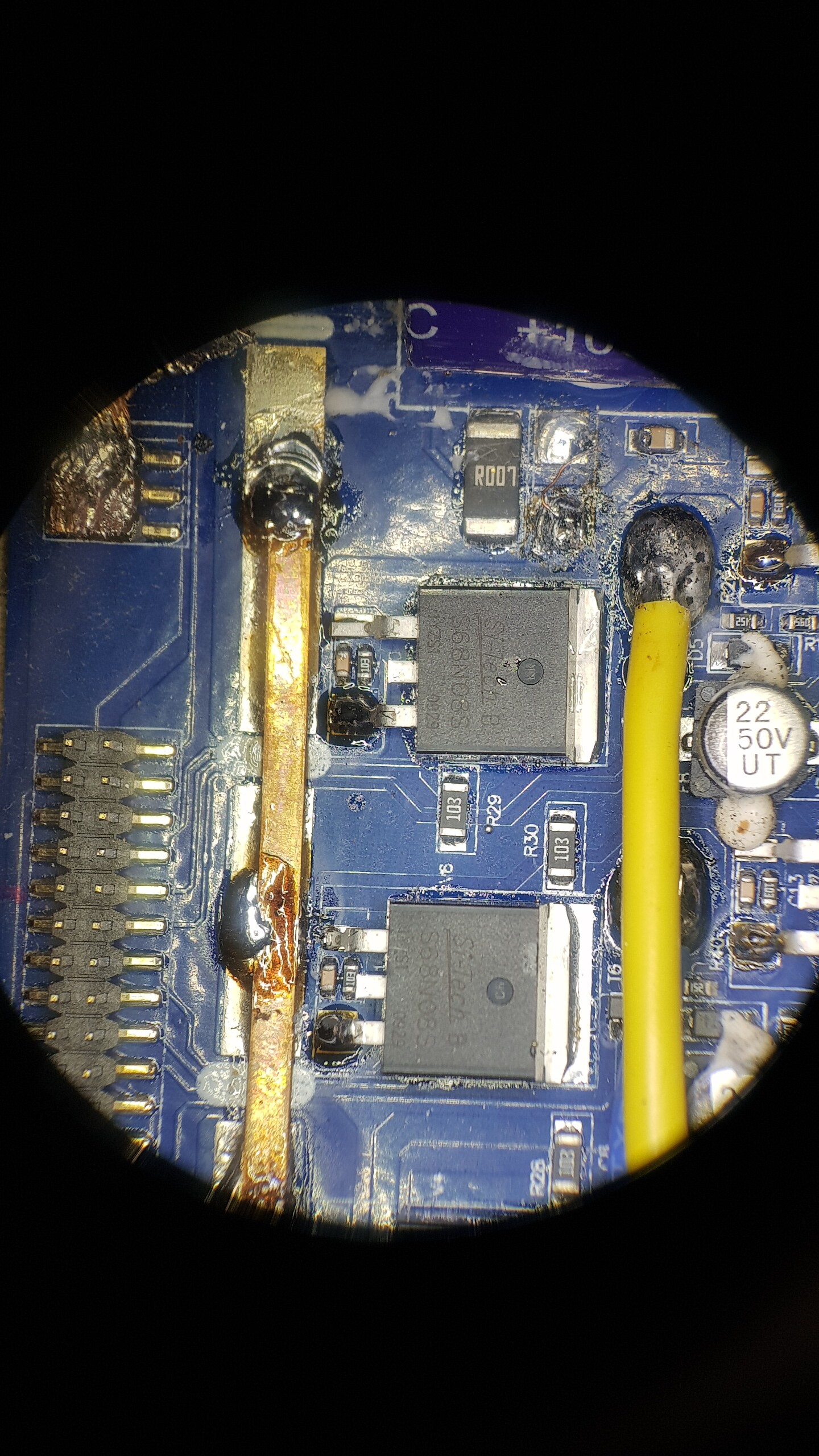
-L’esc Ecomobl 12s de ET2 fonctionne bien , sans a-coups ,et des super mosfets 90V 3mOhms … mais c’est du mode trapézoïdal sensored , et non du FOC . donc bruyant en accel et freinage . sur leurs hubs bruyants démultipliés par train épicycloïdal de perceuse , je pense pas qu’ils sentent la différence , mais sur un vrai hub ou autre direct drive , c’est chiant …
Je passe de 11 à 20A/moteur .![]() mais pas sur les 10’’ …j’ai pas eu le temps de les monter… par contre un seul coté de lesc fonctionne.j’ai du merder qq chose hier.
mais pas sur les 10’’ …j’ai pas eu le temps de les monter… par contre un seul coté de lesc fonctionne.j’ai du merder qq chose hier.![]()
Mais cette panne confirme qq chose :
Un moteur a 20A c’est 0.66Ah/Km ,et 2 moteurs a 11A 0.3Ah/km . J’avais déjà constaté ça sur mon build petits hubs 2WD/4WD ![]() plus tu as des moteurs qui consomment peu - pour une puissance totale equivalente - plus le rendement augmente …
plus tu as des moteurs qui consomment peu - pour une puissance totale equivalente - plus le rendement augmente …
1 « J'aime »
allez … un peu d’elec . P=RxI²(pour les pertes moteur)
config un moteur: (résistance de 1ohm pour simplifier , et I c’est le courant batterie )
1x20²=400w de pertes dans le moteur ,mauvais rendement, ça chauffe … même en hiver
config 2 moteurs:
1x11²=121W de pertes par moteur meilleur rendement et ça chauffe pas . 240w de pertes pour 2 moteurs.
on imagine 4 moteurs , pour la même puissance globale ,
1x5.5²=30,2W de pertes par moteur , 121W pour les 4
avec P=UxI (puissance extraite de la batterie) :
config 1 moteur : ( en 12s un peu déchargée)
45Vx20=900w batterie
config 2 moteurs :
45Vx(11+11)=990W on va dire que c’est pareil .
du coup il me reste le chargeur 42v 2ah de l’hoverboard, et son connecteur femelle, je n’en ai pas besoin, mais je recherche un chargeur pour ma batterie, avec l’embout 5.5x2.1. ( si quelqu’un à ça, et n’en a plus besoin, qu’il me fasse signe)
Je met donc en vente le chargeur 42v 2ah , et son connecteur femelle, pour 15€, ou bien je les échanges contre un chargeur 42V 2ah, 5.5x2.1
il suffit de changer la prise ?
ou faire un adaptateur ?
2 « J'aime »
tu as raison, je n’y avais pas pensé… merci

Plus large(axes plus longs sur les 10"), plus haut ,ça change tout en 10’’.test du freinage cet aprem 
bordel mais les chinois , ils peuvent pas faire un motif discret sur leurs hubs ? là ca fait un peu shogun/goldorak .
2 « J'aime »
ça freine … un peu mieux qu’avec un Lingyi génerique .
disons que ça permet de pas prendre de vitesse dans une forte descente . donc amélioration.
La modif du shunt me fait atteindre 22A/moteur .soit ~1Kw/hub .
Par contre cet esc d’evo LBC , tu sens le vieux firmware mal bouclé de 2016 ![]() après une roue libre , tu accélères un tout petit peu , il te freine car tu roules plus vite que la consigne
après une roue libre , tu accélères un tout petit peu , il te freine car tu roules plus vite que la consigne ![]() la remote est à chier , trop sensible et pas précise , et elle est propriétaire . peut pas mettre de remote lingyi générique . Un swap de la puce de réception 24L01 permettrait sans doute d’y remédier.
la remote est à chier , trop sensible et pas précise , et elle est propriétaire . peut pas mettre de remote lingyi générique . Un swap de la puce de réception 24L01 permettrait sans doute d’y remédier.
et les 10" … un régal ![]() . Vmax en hausse ~40kmh , top confort en chemin et partout ailleurs, bonne maniabilité , voire trop : je vais devoir changer les bushings et mettre un poil plus raides .
. Vmax en hausse ~40kmh , top confort en chemin et partout ailleurs, bonne maniabilité , voire trop : je vais devoir changer les bushings et mettre un poil plus raides .
par contre ça a l’air de consommer plus . ~0,8Ah/Km .à voir sur un ride normal , car là j’ai un peu fait le mariolle pour mes tests …
Je pense avoir trouvé des 10" 350W en 5 fils ici : roue 10 pouce hoverboard / Moteur 350W Pneumatique – Miscooter
mais méfiance , j’aimerais bien avoir confirmation que c’est des 5 fils . je vais poser la question , mais je m’attends à la réponse ![]() : bien sur que oui …
: bien sur que oui …
pendant que je fais mumuse avec ce setup … prochaine evolution , greffer des cerclages de roues arriere de Xaomi M365 sur les petits hubs 5fils . comme un direct drive , mais avec du grand pneu .
2 « J'aime »
@lurch Je vois que tu t’y connais bien en carte electronique, ESC, et sans doute BMS, j’ai besoin de ton avis : j’ai démonté la batterie de l’hoverboard dans le but d’ajouter un port de charge. J’ai déssiné sur l’image :
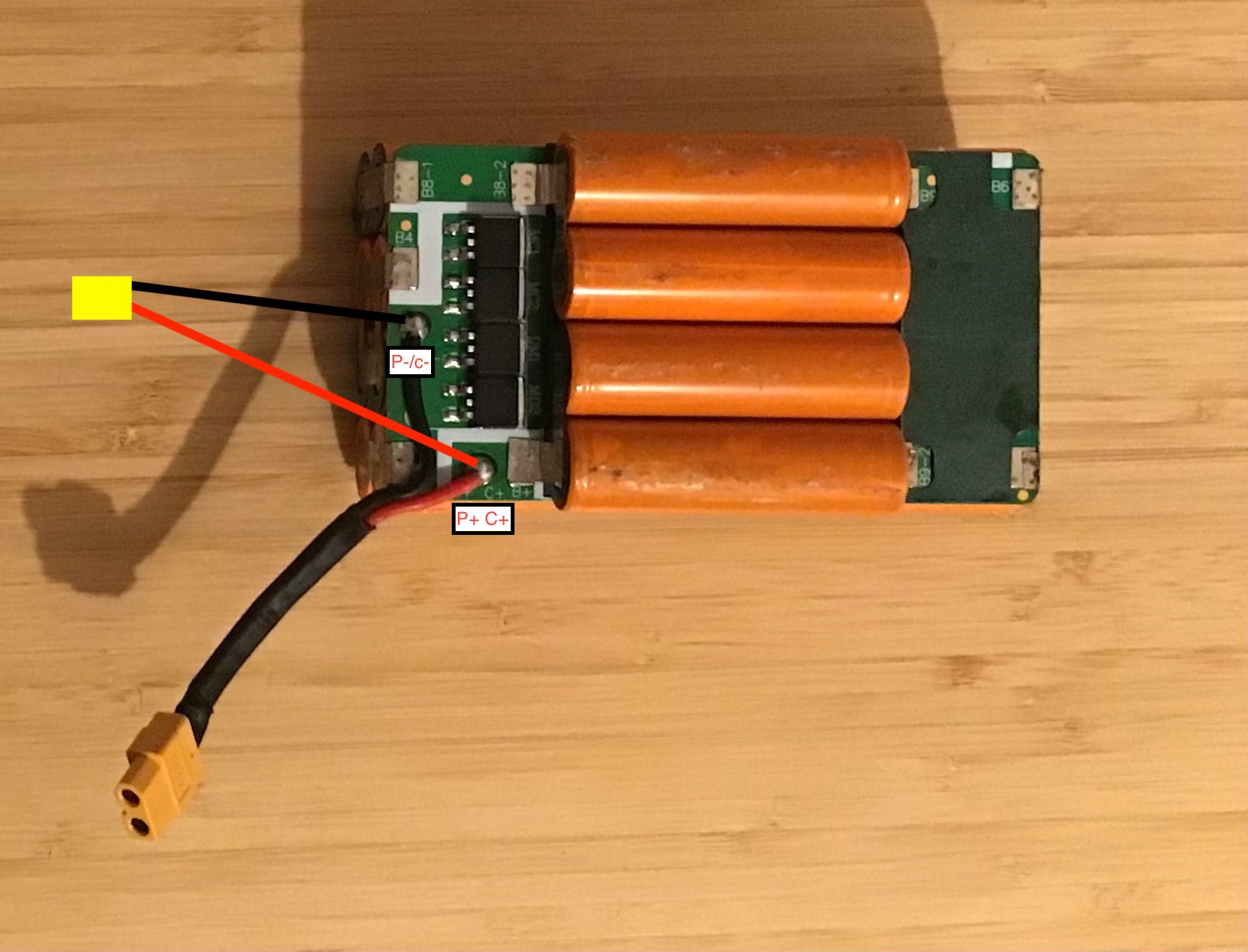
est ce que c’est correcte ?
Yes . Le port charge/décharge est commun. Ya écrit quoi sur les cellules?
y’a rien écrit , sinon c’est 2ampère par céllulle je crois…
La batterie me servira a recharger des telephones, avec un régulateur vers 5v
les cellules ont l’air d’avoir coulé ? ou c’est que des traces de colle ? verifies quand meme l’equilibrage . tension de chaque cellule 2p . 