je suis très indécis sur la partie vesc, j’ai vu sur esk8.news que plusieurs partaient sur le little focer, mais ça me fait mal de mettre 325€ la dedans… D’autant plus que je vois dans la vidéo de ce post qu’il a l’air de faire ça avec un vesc 4X, ce qui couterait bien moins cher…
Quelqu’un a une piste à ce niveau là? Et sinon, d’autres personnes se sont lancées dans ce genre de projet et auraient quelques infos à partager?
Pour info, j’ai déjà build un skate electrique et un mountainboard electrique, donc faire du DIY ne me fait pas trop peur, et j’ai également une imprimante 3D.
Jusqu’a 12s , un simple vesc4 suffit(mais pas en foc ,sinon …boum…)
Au dela de 12s : vesc6 . Tu as des 75100 a moins de 100€. . Mais il faut lui ajouter un imu externe. Sauf les trampa deja équipés.
Jai le meme projet,mais low budget, pour le moment jutilise un esc d’hoverboard avec une seule sideboard et son imu …mise au point en cours
j’ai pas comparé les prix mais spinted a ce quil faut en stock .
il me semble que l’idéal c’est de monter en intensité pour avoir de la répobse sur ce genre . sije devais me lancer je partirai en 16S. apres faut voir si ça passe dans ton budget.
Petit up du sujet :
j’ai reçu le moteur (par contre ne commandez pas directement via son site, jai attendu plus de 2 mois sans suivi ni réponse, pour au final devoir demander un remboursement…, du coup go via aliexpress et la en moins de 15 jours c’était bon).
J’ai également commandé et reçu le flipsky 75100 + imu, j’attend les foot sensor la.
Par contre, mon pneu (sans chambre à air) se dégonfle très rapidement après l’avoir gonflé, vous avez des tips avec ce genre de pneu? Il est pas crevé, on dirait juste que le pneu épouse pas parfaitement le rebord de la jante et du coup ca laisse un peu passer l’air…
Tu peux vérifier cette théorie en mettant de l’eau savoneuse entre le pneu et la jante, voir s’il y a de la bulle même minime. Si oui alors commence par choper un démonte obus de valve, sourire aux lèvres et peut-être bière (fraiche) à la main si tu manque de bagou ou que ta affaire a un con, va faire décoller le pneu sur la machine d’un shop automobile/l’atelier d’un circuit de karting ou quoi. Obus démonter, bien lubrifié le flanc du pneu a la graisse ou savon, (peut être le plaqué contre le fond de jante avec une sangle pour qu’il prenne mieux la pression ça je ne sais pas) et gonflage au compresseur jusqu’au claquement.
Regarde des vidéos de montage de pneu de kart, ce sera plus parlant.
Profites-en pour verser du liquide anticrevaison pour tubless avant de remonter le pneu, ça ne servira pas tout de suite mais un jour ou l’autre tu seras content de l’avoir fait
Edit en plus du reste, tu peux aussi en profiter pour mettre un bon pneu.
je n’ai pas encore eu le temps d’aller voir chez un shop pour le pneu, mais j’essaye tant bien que mal d’avancer sur la partie config/electronique et c’est pas simple…
quand je lance la détection du moteur via vesctool (firmware 6.2 no_hw_limit), ça fonctionne bien le moteur tourne correctement et j’obtiens des valeurs qui semblent correctes :
Motor current : 50.11 A
Motor R : 106.21
Motor L : 245.78
Motor Lq-Ld : 97.50
Motor Flux Linkage : 22.84 mWb
Sensors : Hall sensors
Par contre, quand j’essaye de faire tourner le moteur via l’onglet « Controls », ça ne tourne pas du tout, peu importe le courant que je met ou le sens de rotation…
J’avais lu sur diverses forums qu’il y avait une histoire de phase filter à désactiver, donc j’ai suivi la procédure (Tips flipsky vesc)
J’arrive également à faire le setup IMU via vesctools (non sans mal, j’ai testé 3 imu différents, et au final je part plutôt sur le MPU 6050 qui semble poser le moins de soucis). J’arrive bien à calibrer l’orientation & la partie accelerometre, mais au final une fois toute la conf faite, ça ne bouge pas d’un poil… J’ai bien activé le mode balance, mais peut être qu’il existe une conf à modifier pour le rendre vraiment actif…
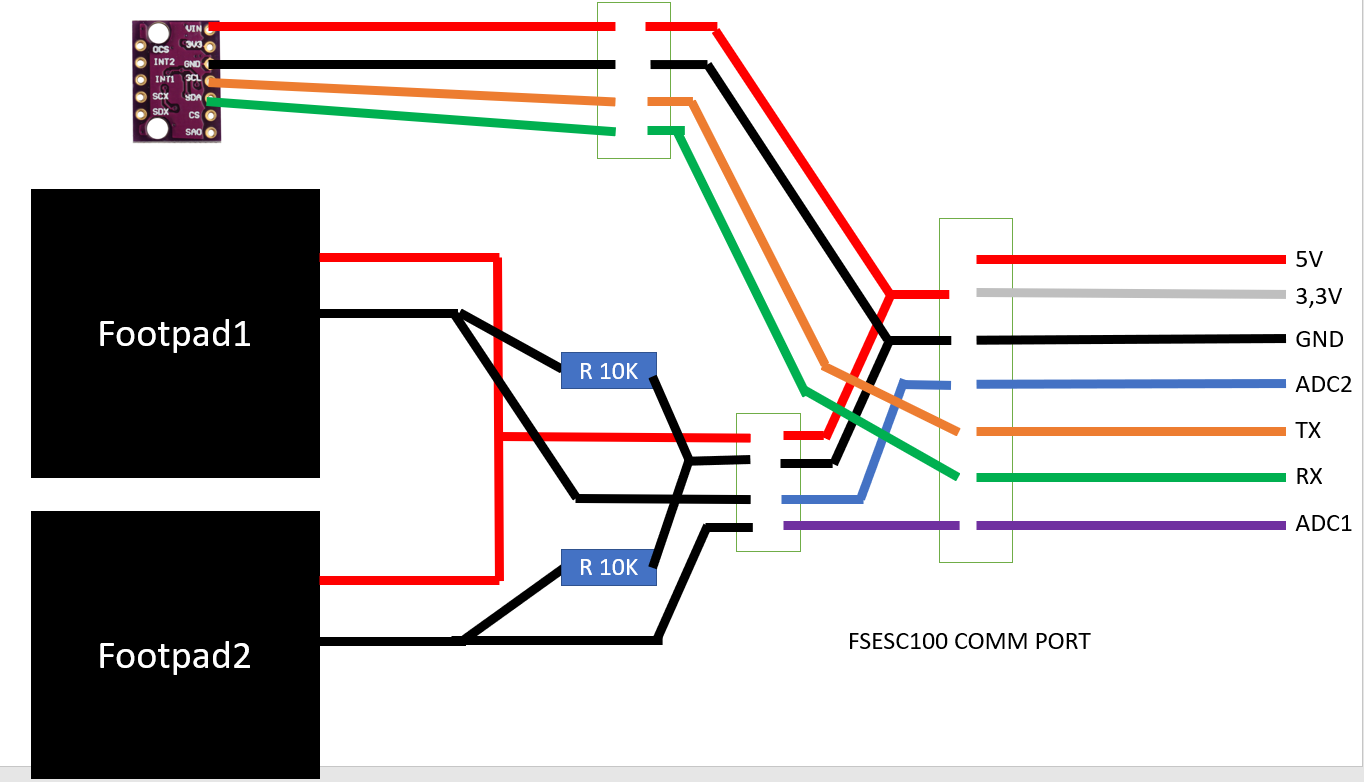
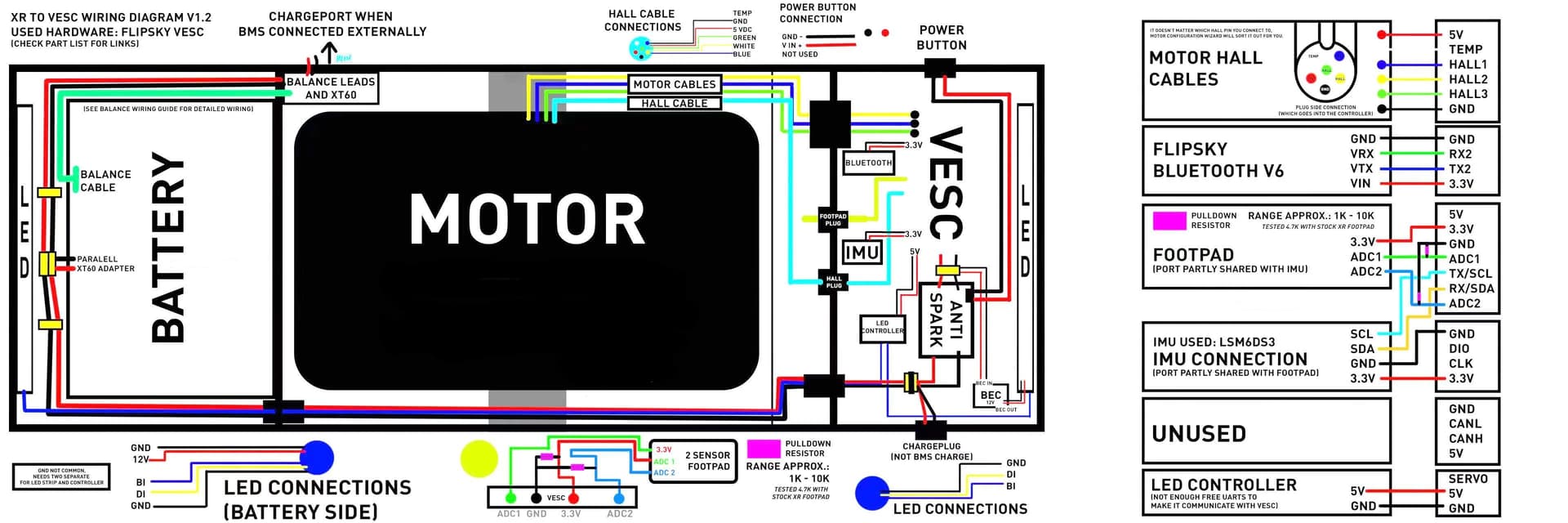
Enfin dernier soucis, pas moyen de détecter mes foots pads sur ADC1/2, pourtant j’ai vérifié plusieurs fois le schéma tout parait correct :
J’avoue que je n’ai plus du tout le projet en tête mais ta config ne me choque pas. Il faut effectivement virer les filtres de phase, très important.
Je ne pensais pas que c’était un tel vortex de merde la connectique d’une OW diy. En soi ce n’est pas non plus de l’astrophysique quantique et je me dis qu’il suffit de passer une bonne nuit pour y arriver mais si tu y est pas déjà, je suis certain que le discord floatwheel répondra à toutes tes questions : Floatwheel
Je m’étais monté (ou du moins j’avais finalisé le début d’assemblage) d’une floatwheel il a deux ans environ, sur la base d’un BalancePro 6 (un HW 6.x avec un IMU intégré), et avec un firmware en 5.2 (une vieillerie vu le firmware actuel !)
Ça roulait bien pendant plusieurs mois (vraiment top comme machine, et un effet wahou au boulot !), mais il ma fait quelques misères dont des bizarreries sur la tension batterie détectée (trop faible) donc autant te dire j’ai fait deux/trois plongeons pas très agréables jusqu’à ce que je comprenne via VESCTool qu’il détecte une tension incorrecte de plusieurs volts …
Je voulais la remettre en route cet été avec un 75100 pas trop cher (et passer en 16S ?) et un imu externe mais je craignais de ne pas arriver à choper le signal de l’IMU : tu indiques donc y être parvenu sans trop de difficultés ?
@arsenic hello, oui je n’ai pas de soucis avec l’imu (mpu 6050) avec le flipsky 75100, la détection est fluide et semble cohérente.
Sinon nouvelles du jour : j’ai réussi à aller plus loin, j’ai installé le floatpackage après avoir fait la configuration de l’imu, et switchant sur le mode no_app plutôt que balance ça fonctionne pour le 75100. Je dois juste configurer mes ADC1 & 2 à 0v parce que je n’arrive pas à résoudre ce problème la pour l’instant, mais du coup la board accélère/freine bien en fonction de l’inclinaison… ça devient bon ^^
Nouvelle avancée cette semaine : une fois le floatpackage configuré, je remarque que les ADC1/2 fonctionnent bien en fait, donc tout est a peu près fonctionnel : la board s’enclenche bien quand j’appuie (à la main pour l’instant) sur les 2 sensors et que je l’incline, ca fait plaisir.
Par contre pour l’instant le moteur tourne direct à fond meme avec une faible inclinaison, donc y’a encore des réglages à faire!
possible oui, j’avoue que pour l’instant je n’ose pas encore monter dessus ^^ Je vais jouer un peu avec les réglages avant de me lancer histoire de pas faire un vol plané!