Sur une autre discussion je parlais de me lancer dans les supercondensateurs comme stockage d’énergie pour un E Bike, mais pour l’instant j’en suis à monter un E Bike avec un VESC 4.12 classique.
J’ai pu brancher la batterie, moteur, gâchette et VESC sur l’ E Bike mais en faisant fonctionner le moteur à basse vitesse le moteur galère. Je suppose que c’est le fait que les Capteurs Halls ne soient pas connectés.
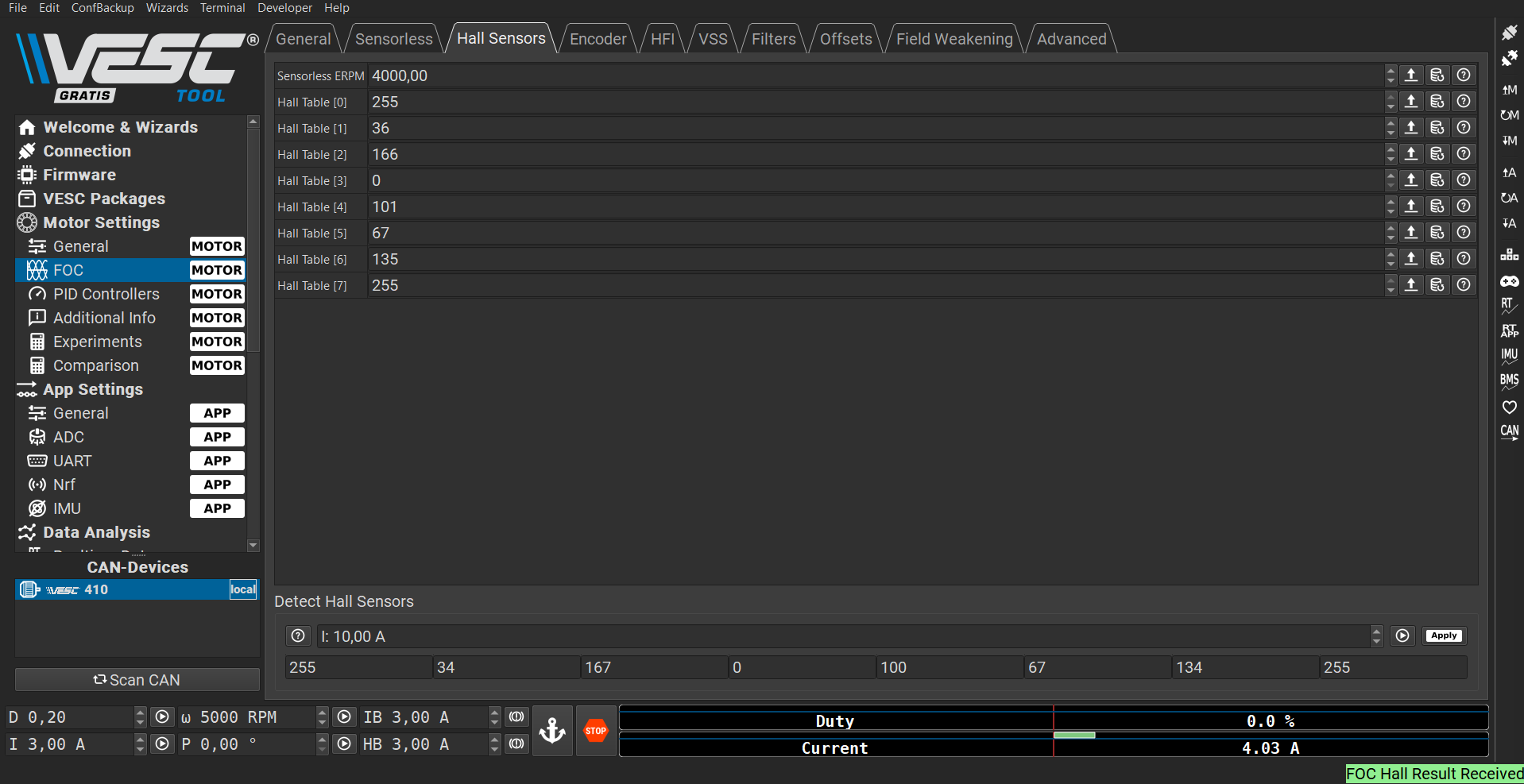
J’ai essayé de brancher et configurer les Capteurs Halls pour l’instant sans succès.
En BLDC la détection fonctionne (avec un D à 0.1 au lieu de 0.05), mais ensuite je n’arrive plus à faire démarrer le moteur. Le VESC détecte quand la gâchette est activée, la lumière verte s’intensifie mais pas de réaction du moteur.
En FOC, la détection ne fonctionne pas (« Bad FOC Detection Results Recived »). Mais la gâchette fait actionner le moteur.
Ca peut être un problème de branchement ?
J’ai testé les 3 capteurs hall en faisant tourner la roue et ils fonctionnent.
Je suis preneur de chose à tester, je sais plus trop quoi essayer.
c’est quoi comme type de moteur, un hub dans la jante? ou un moteur plus classique de chez nous? (auquel cas tu fais bien tes tests moteur à vide et sans transmission?)
pour compléter la problématique de base de moteur qui fait du bruit/broute à basse vitesse, je souhaite limiter la vitesse à 15 km/h pour mon ebike, donc j’ai mis le ERPM à 5000. C’est peut être trop bas ?
je reviens sur ce que j’ai dit dans le premier post, la détection ne semble pas se faire en mode BLDC. En fait ça met détection ok même si les capteurs hall ne sont pas branchés…
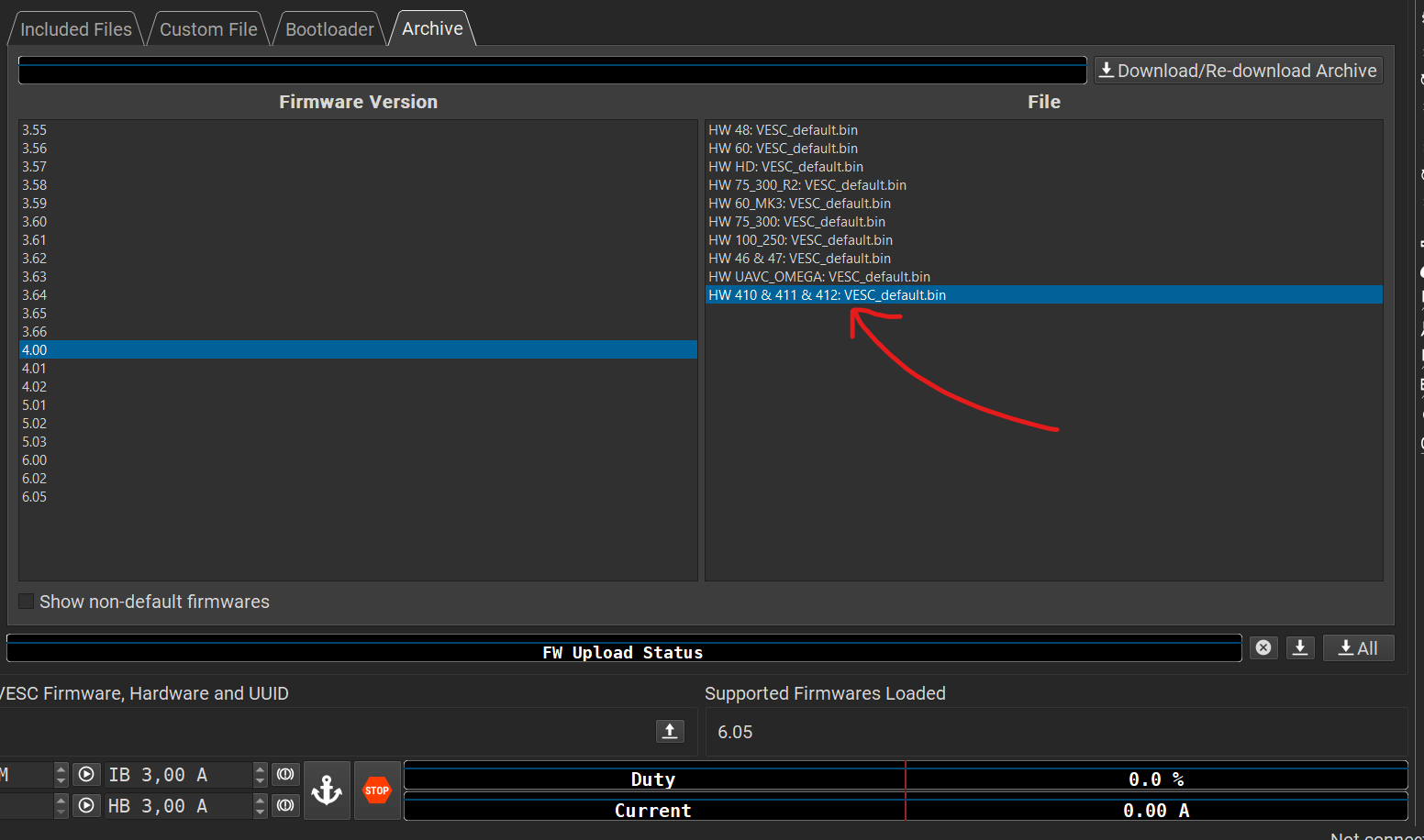
Tu devrais downgrade ton firmware et retourner sur les firmware des années où ils ont sorti l esc.
Je savais même pas qu’il avait sorti une version 6.05 pour un esc 4.12.
j’ai eu le cas en branchant un vieux vesc 4 vedder sur vesctool6. il propose une maj du fw .
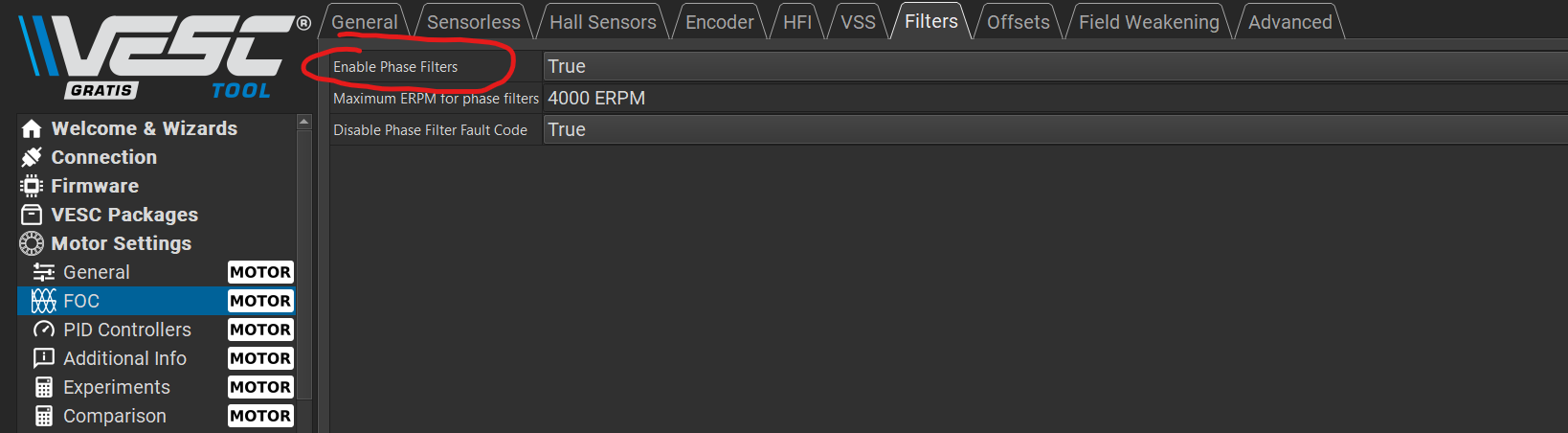
d’après ce que j’ai lu , ça peut poser des problèmes de détection , même en désactivant les phase filters , absents des ‹ vieux › vesc.
le seul avantage à mon avis est d’avoir accès à d’autres types d’observer , intéressant en cas de moteurs hubs zarbis . ( trot, vttae …etc .)
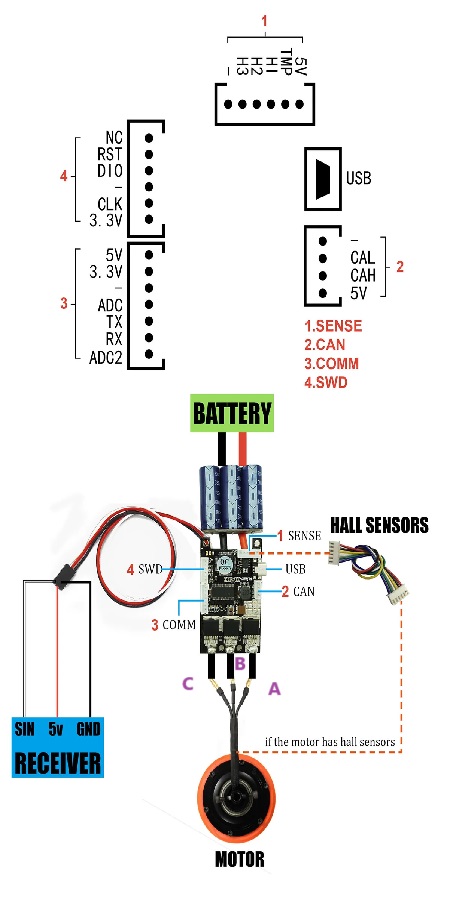
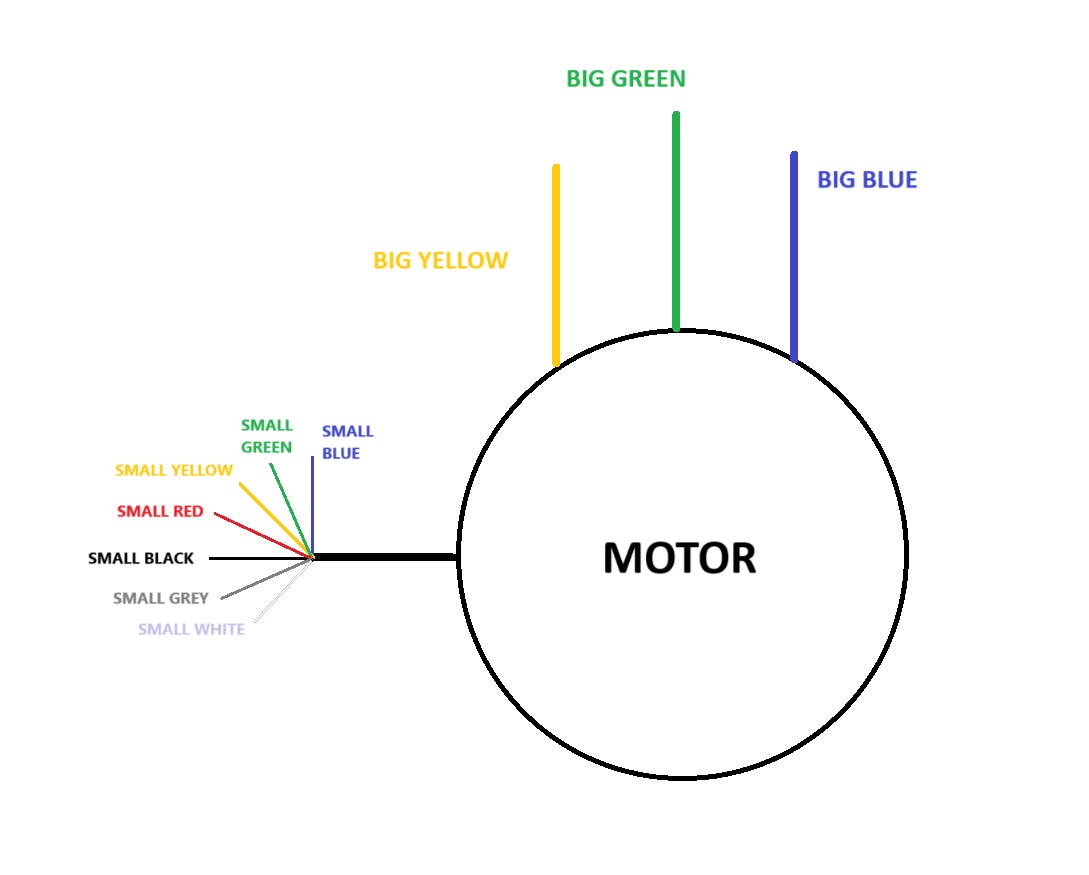
J’ai branché comme suit :
BIG BLUE sur Phase A
BIG GREEN sur Phase B
BIG YELLOW sur Phase C
SMALL BLACK sur - (GND) (du socket SENSE)
SMALL RED sur 5V (du socket SENSE)
SMALL BLUE sur H1 (du socket SENSE)
SMALL GREEN sur H2 (du socket SENSE)
SMALL YELLOW sur H3 (du socket SENSE)
SMALL GREY non connecté (je crois que c’est la température)
SMALL WHITE non connecté (je crois que c’est le capteur de couple/force)
Il y a bien 10 câbles qui sortent du moteur : 3 des phases, 5 pour les capteur halls, 1 pour temp, 1 pour capteur de couple/force. Je n’ai pas la datasheet du moteur malheureusement.
Ca semble bon . Juste grey et white … surement capteur de T° et capteur de rotation.
Verifies esc allumé avec un multimètre que tu as alternativement du 3~5V sur les fils verts bleu et jaune en tournant la roue . Avec tous les fils branchés bien sur. Car c’est le vesc qui polarise les capteurs hall du moteur .
Pour le fw , c’est le bon . Si ca ne fonctionne pas , refais la meme avec vesctool3 . Plus rustique, mais plus contemporain de ton vieux vesc …
Incroyable la détection des capteurs Hall a fonctionné en dégradant le firmware à 4.0 (et le VESKTOOL 6.05, je n’ai pas eu à le changer) !
Merci bcp pour votre aide Tignous, Lurch et Rookietwo !
Maintenant le moteur démarre très bien ! Super nouvelle
Par contre il fait un bruit chelou et vibre lorsque le vélo atteint sa vitesse de 15 km/h : j’ai limité le ERPM à 5000
Vous pensez que ça peut abîmer le moteur ?
Avez vous une idée de pourquoi ça vibre ?
Alors javais oublié de te dire: lors de la detection moteur /hall , il est conseillé de mettre APP sur none , et débrancher tout recepteur sur l’uart ,adc et ppm …
Ensuite tu as quel moteur ? KV ,nb de poles , direct drive ou démultiplié ?
Quelle tension de batterie ?
As tu choisi du coup le bon modèle de moteur dans le wizard detection ? Quel courant pour la detection ?
Tu peux la refaire manuellement dans foc/general a differents courants ,pour voir si c’est coherent.
Il y a un parametre dans Foc/sensor , sensorless erpm je crois qui definit quand lacher les halls et passer en sensorless . A partir d’une certaine vitesse ,les halls deconnent . Ou l’acquisition dans le vesc je sais pas.donc il se débrouille en sensorless en utilisant l’observer 'Ortega '. Pas le choix sur les vieux vesc.
.
Déjà reproduire ton phenomene a vide en activant RT pour voir les erpm correspondant sur le graphique… et regarder les courants qd ça déconne.
Salut !
Yes merci je vais regarder pour ces nouveaux paramètres !
Ensuite tu as quel moteur ? moteur hub arrière de EBIKE
KV ? je ne sais pas, c’est pas marqué sur les moteurs de EBIKE je crois
nb de poles ? il me semble que j’avais compté 14 pôles, mais je ne suis plus sur. Ça peut avoir un impact sur le pilotage du moteur si ce n’est pas le bon nombre de pôles ?
direct drive ou démultiplié ? démultiplié train épicycloïdal
Quelle tension de batterie ? 36 V
As tu choisi du coup le bon modèle de moteur dans le wizard detection ? oui j’ai mis sur large outrunner
Quel courant pour la detection ?
J’avais vu l’option sensored qui passe sensorless ensuite. C’est une bonne idée je vais tester ça !
« Déjà reproduire ton phenomene a vide en activant RT pour voir les erpm correspondant sur le graphique… et regarder les courants qd ça déconne. » je pense pas que à vide le moteur déconne, c’est quand il est en charge, mais je vais faire un test pour être sûr
ahah oui sorry je n’ai pas mis de photo, je vous prépare ça ! C’est pas hyper impressionnant c’est un vélo de ville. 15 km/h c’est pour faire un vélo à assistance au démarrage avec une petite batterie et que le vélo soit léger. Une fois le premier proto fini ensuite ça sera des supercondensateurs avec de la régénération !
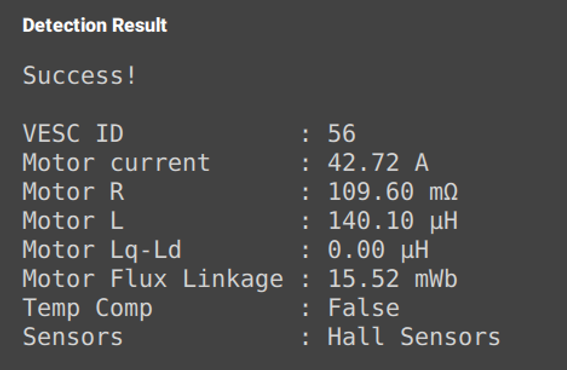
alors le courant lors de la détection de 42.72A , c’est le courant max conseillé par vesctool déterminé pdt ses mesures . au delà , ça peut saturer . ou pas . c’est déjà beaucoup pour un hub de petit vae , qui dépassent rarement les 15~20A.
refais la détection en manuel dans Foc , penses à faire apply et sauver , avec un courant inferieur ou supérieur pour voir si tu as ~ les mêmes résultats .et re détectes les capteurs hall aussi en manuel .faire Apply , et sauver …le tout bien sur avec app sur ‹ none › et tout récepteur uart/ppm débranché .
tu as un moteur qui a une charge mécanique même à vide ( pignons , roue …) donc ça peut fausser les résultats .
tu peux aussi retenter une détection auto. avec medium ou small outrunner . ou big bike motor >6Kg… je sais plus …