Quelques épissures et un peu de soudure et hop petit raccord GH1.25 vers PH2.0.
T’avais raison @cathode avec les hall ça va mieux ![]() …
…
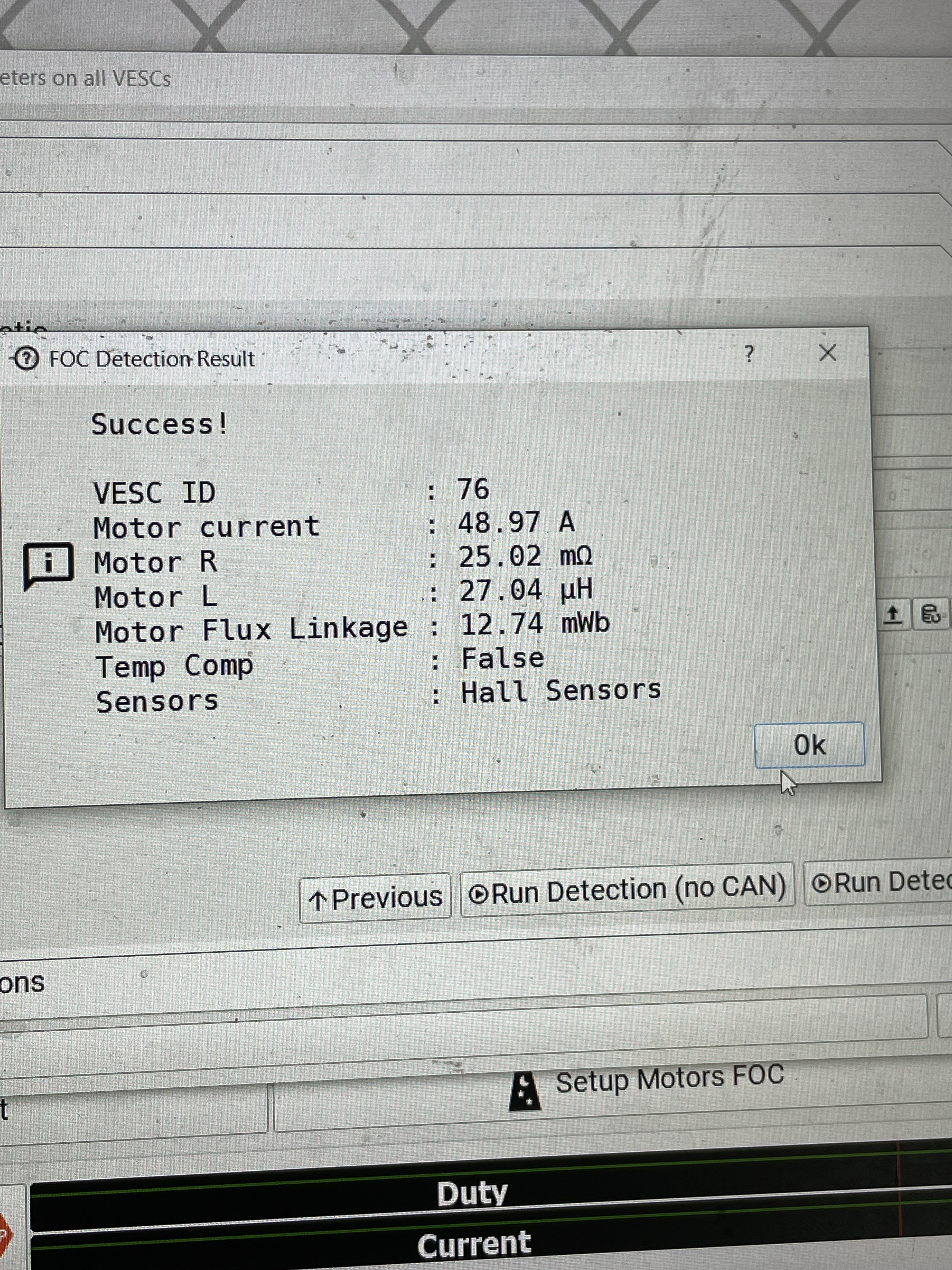
Bien que la détection me dise « sensorless » le hub n’oscille plus et démarre très progressivement. Hâte d’essayer !!!![]()
1 « J'aime »
Si la détection te dit sensorless c’est que tu es sensorless.
Passe en manuel, auto connect, read parameters application et moteur ( ↑M et ↑A) + activation de RT et RT APP puis :
Motor settings/FOC/ filters–> phase filters → false (ou pas si ton vesc le fait)
**Motor settings/FOC/ /hall sensors–> start detection
*Général /général / motor direction si besoin
Général / Current → ce qui va bien
App settings / général → UART ou PPM+ UART ou PPM seul ça je ne sais pas.
Fait ta config remote dans l’onglet qui vient d’apparaitre juste en bas (pro tips commencer par contrôle type : none et ↓A pour que le moteur ne tourne pas quand tu feras la calibration dans mapping)
*N’oublie pas de remettre un control type quand ta fini, vérifie que ca tourne dans le bon sens
↓M
↓A
**Fait attention au message en fin de detection hall
Merci @cathode , très instructif bien qu’un peu effrayant pour un béotien. La bonne surprise c’est qu’avec un p’tit coup de wizard le zinzin a trouvé les hall ![]()
Aujourd’hui test de la board avec le MakerX HI200 75V300A… c’est le jour et la nuit par rapport au flipsky 75100. La puissance est carrément « insane »![]()

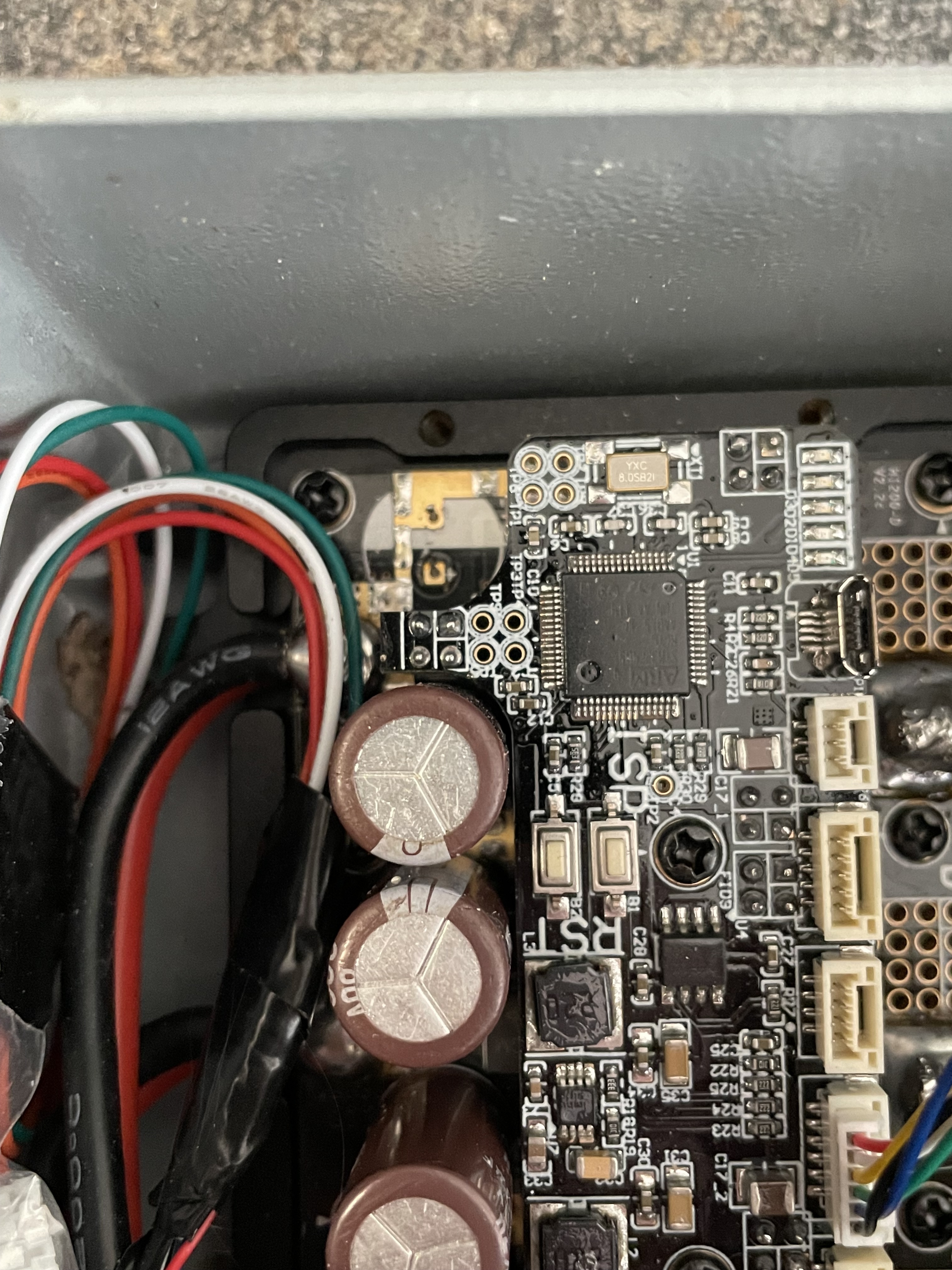
Le problème c’est que le power tape qui fixait le boîtier a lâché lors d’une belle gamelle et un Condo à été décapité dans le choc ![]() …trop con…
…trop con…

C’est un Condo 80V 390 microfarrad je pense l’avoir trouvé chez Mouser EKZN800ELL391MK25S les caractéristiques et les dimensions collent. J’espère qu’ils vendent à l’unité
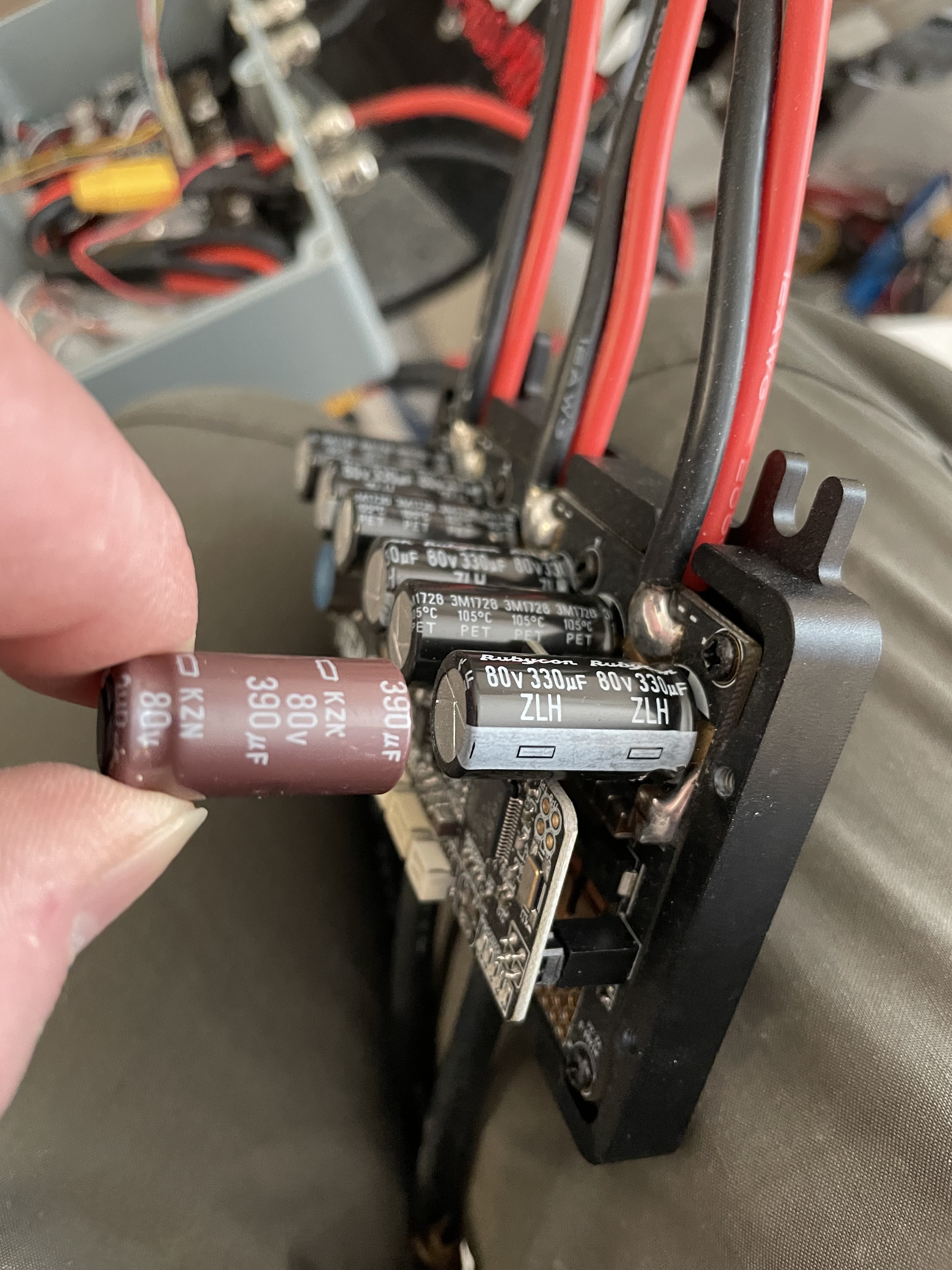
chek le circuit , mais c’est plusieurs capas en parralele . tu peux meme rouler sans . et/ou mettre la 330uF à la place.
Cool merci🙏 Je chek comment ?
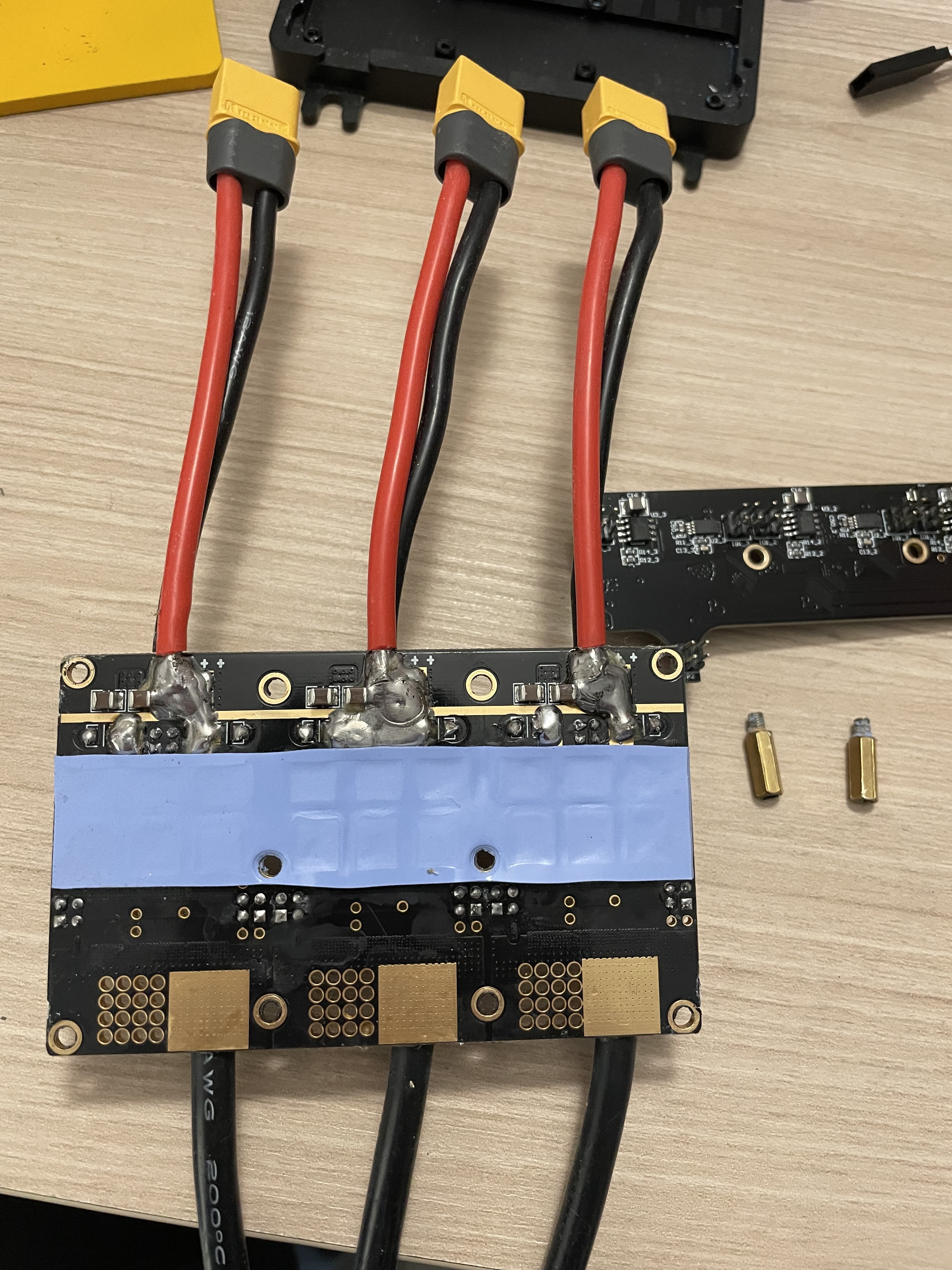
multimetre . les + sont reliée ensemble , et les - aussi .
Ce serait sympa de lui faire un petit bras oscillant et monter un petit amortisseur ![]()
et sinon, les sensations sur 3 roues ? tournabilité par rapport à ton mtb ?
C’est trop mou de l’avant avec les ressorts la contrainte est importante sur le truck avant sinon de manière surprenante ça carve bien …![]()
Faut que je passe aux élastomères et peut être amorto pour voir ….
Là il faut que je m’habitue à la puissance car la board peut me laisser sur place

Un de vous sait pourquoi ils ont doublé les condensateurs ? Ça a l’air de fonctionner comme ça avec juste 5 condo…
1/ Crée de la redondance car mine de rien, c’est la première ligne de protection.
2/ Pouvoir lisser plus de voltage
Pti bras de trotinette, pas con pas con
Finalement je ne vais pas désosser l’autre makerX.
Sa micro USB a été arrachée avec les pistes mais si je ne me trompe pas je peux continuer à la programmer via le Métr Pro ( photo précédente) en le branchant au port CAN. Je me trompe peut être. Any thoughts?
Yes roue de trot et bras de trot. En fait c’est une trot sans guidon ![]()
![]()
Tu crois que ça craint de rouler avec un seul? Je vais quand même en commander chez Mouser France un ou deux si j’y arrive car ça serait con de cramer un truc à ce prix pour un Condo à 1.5 euro…![]()
le metr pro je ne sais pas, mais tu peux ressouder un port en te soudant la ou vont les pistes arrachées ou aussi passer par le dentbleu.
Ça craint si tu l’utilises à fond, voltage et intensité haut/maximal. En gros si il y a trop à lisser quoi.
Oui je pensais au Bluetooth par le MetrPro…les pistes ne sont plus visibles