Salut Les jeunes Sk8ters
j’ai 54 ballais, je vis à nice, je suis tombé sur votre forum en faisant des recherches sur les VESC au hasard pour mon ULM de construction amateur (autogire)
j’ignorais qu’il existait des Skates électriques …je pense que je vais m’en faire un …
mes hobbies sont principalement axés sur la construction amateur orientée plongée (recycleur) et ULM (je me fabrique des autogires et je vole dessus … au secours…), je pourrai vous poster quelques photos si cela vous branche mais c’est pas le thème de votre forum
je suis équipé tour fraiseuse conventionnels (matos chinois) et fraisage cnc 3 axes (portique chinois)
je peux aider dans ce domaine.
en revanche je ne suis pas trés bon en électronique et à ce titre j’ai quelques questions de nul à vous poser si vous m’en donnez l’autorisation …
bonne journée
G
bienvenue .
moi meme age , mais vieux roulant sur 4 roues depuis qq années.
hésites pas à poser des questions elec. ou autres . y’a des bons ici … on pratique depuis un moment , et on a eu pas mal de cas tordus .
merci pour la bienvenue c’est sympa,
j’ai encore parcouru le forum … c’est completement éffarant ce que l’on peut faire avec ces skates !
tout commence par savoir où tu souhaites rouler : route/TT , ça va conditionner tes roues.
ensuite ballade ou mode carving ou enervé en foret : trucks et deck,
puis l’autonomie/puissance : taille de batterie qui conditionne le poids et choix de l’esc .
j’ai un caractère assez pépère, un engin capable de rouler sur des chemins me conviendrait parfaitement,
pour l’autonomie ma foi je n’ai pas trop d’idées de ce qui est possible,
à en juger par une expérience routière de 14 ans en scooter vectrix, puis C évolution montre que lorsqu’on choisit un « gros pack » on réduit les risques de défaillance de la batterie …
j’ai exploré les fiches techniques de contrôleurs Vecs et une question me vient à l’esprit.
l’accéléreration d’une corps demande de la force, donc si j’ai bien compris du couple moteur et donc des ampères,
hors si j’ai bien pigé l’accélération est controlé à la main en appuyant sur une commande, on doit donc rapidement se trouver à mal contrôler l’accélération et à injecter trop d’intensité dans le moteur , qu’est-ce qui empèche que cela se produise svp ?
merçi
salut lurch c’est le spécialiste de l’électronique.
je veux bien voir ce sue tu fais comme objet de plongée, j’ai eut a l’époque envie de me faire un scooter sous marin pour explorer les fonds.
si j’ai bien compris ta question pour gérer les accélération c’est un potentiomètre a ressort. donc tu mets des impulsions avec le pouce et dès que tu relâches ça s’arrête.
de 0v a 1.6v tu freines, de1.6 a 3.3v tu acceleres. le vesc te premet meme de gérer ta courbe d’accélération.
salut,
en fait si tu veux pour le moment, en dehors des skates électriques que je viens de découvrir par hasard, j’utilise un brushless de 8000 W pour lancer un putain de rotor d’autogire ulm de la mort, de 8.6 m de diamètre et de 37 kilos, soit un moment d’inertie de 160 K/m^2 …
ce sont mes recherches de controleur qui m’on ammenées ici , ensuite j’ai vu vos activités et cela m’a un peu secoué …
pour cela j’utilise un controleur chinois de merde fly « je sais pas quoi » de 400 amps en pic. (j’ai achté cela avec le moteur)
et là tu imagines le couple demandé au moteur si tu accélères trop fort… j’ai grillé un 50 kv cash aprés 2 minutes …ayant atteint 190 tours minutes
c’est celui là que j’ai grillé de prélanceur :
j’en ai fait un autre prêt à griller aussi , avec un 166 kv (donc moins de couple et une réduction de 1/5 de plus que le 50KV)
j’ai pondu un programme d’arduino pour piloter l’accélération en implémentant un sensor d’intensité pour interrompre l’accélération et éviter de griller mon bordel et puis avant de commencer à souder je surfais sur le net et j’ai trouvé le vesc projet et ensuite j’ai vu le gros controleur 100/250 et son app vesc tool etc
j’ai différé le montage de merde que je faisais en lisant vos exploits
je me demandais donc ce que fait le controleur quand il detecte une intensité plus importante que celle choisie ?
est-ce qu’il limite l’intensité ?
mais à ce moment là que se passe t’il ?
genre tu appuies sur ta commande doucement mais tu accélères trop et lui il le voit , il limite le courant et ensuite ? tu sens quoi sur ton skate ?
et ensuite le controleur tente t’il d’accélérer le moteur jusqu’à l’ordre initial donnée au doigt sur ta commande ?
moi quand j’essore ma poignée de « gaz » sur le C évolution (scoot elec bmw) il se démerde et je supoose qu’il n’envoie pas toute la sauce (sinon j’aurais déjà grillé …), enfin je sens rien mais il doit bien limiter l’accélération et ensuite aller jusqu’au régime demandé par ma position de gaz…
bon tu me diras avec le C evo mieux vaux pas jouer tu finis vite dans un mur ca pousse beaucoup trop fort mais bon …
bref comment cela marche pour que vous ne grilliez pas vos moteurs ?
parce qu’un bon mec de 85 kilos sur le skate si vous ouvrez les gaz, cela produit un couple de folie qui brulerait tout là aussi … comme mon putain de rotor et comme sur mon scooter …
scusez mon ignorance… haha
je vous mets des photos du giro dessous mais attention je mets pas cela pour rouler des mécaniques, juste pour illustrer mon propos … y a tellement de menteurs sur le net que je préfère mettre une photo…mais on s’en bat les C… des autogires , ce qui m’excite c’est vos brusless et tout ce que vous en faites … un truc de malade
coté plongée j’ai fait un recycleur dans les années 1995 à une époque où les recycleurs coutaient 100.000 francs (10 briques on disait…)
ca permet de rester 6 heures sous l’eau ou de partir en bateau pendant une semaine sans regonfler, et tout cela avec 2 petites bouteilles genre porte clé (ou presque)
un recycleur nécéssite une électronique qui lit la pression partielle d’oxygène du mélange pour te permettre de respirer un gaz à une pression partielle constante de 1.6 bars (à 2 tu convulses et en dessous de 0.16 tu perds conscience… pas glop on rigole pas … du tout )
j’y pigeais rien en électronique alors j’ai acheté un bouquain d’elec de base et un bouquain sur les pic et j’ai fait les oxymètres qui traient les infos de 3 sensors.
les sensors sont capricieux et peut fiables (ils merdent des fois… ) ce sont des piles à combustibles en fait et il t’en faut 3 pour les comparer entre elles dans un système de voting logique … une merdasse … bref j’ai fait cela et je plonge toujours avec le système … et puis les pics quelle merdasse aussi, genre lire le gros pdf du spécialiste français (bigonoff pour les vieux) du pic essayer de piger … bref je suis vivant …
comme fallait faire des caissons étanches et des pièces étanches j’ai aussi appris à usiner … vu le prix des tourneurs… et mon pote lui avait étudié cela donc il m’a appris… putain il est mort dans l’attentat de nice quelle merde…
à part cela j’ai récement vu les petits propulseurs brushless de drônes sous marins… genre 200 balles et encore… étanche 200mètres … moi aussi comme toi cela m’excite de me faire un scooter sous marin …
à mon époque c’était la merde de faire sortir l’arbre du caisson … et puis y avait pas de brushless , pas de lipo … rien … j’ai laissé tombé …
à l’époque je faisais des lampes de plongée avec des nimh et des ampoules allogènes qui chauffaient tellement qu’elles brisaient les hublots … quelle époque vous vives les jenus … putain la cnc maison, le lithium, les arduinos, les compilateurs gratos … la doc ; l’internet … le pied …
si tu te fais un scooter et que tu galères pour faire les caissons batteries dis le moi, je te les fais, j’en ai tellement fait … des lampes, des caissons pour les radios (quand tu remontes et qu’il y a plus de bateau … si si) des caissons pour les fusées de sauvetage, etc etc … j’ai tour fraiseuse et cnc … et j’en fais plus grand chose sauf des pièces de giros pour les rares tarés qui se font encore des giros … mais il en faut on en cherche … les giros coutent 120.000 boulent aujourd’hui … si tu te les fait ca coute 20.000 alors on fait survivre la construction amateur … y pas que les vieux blindées qui ont le droit de voler merde !
avant pour construire un autogire fallait aller lécher le cul d’amateurs prétentieux pendant 3 ans avant qu’ils te filent des infos … aujourd’hui y a des forums, tu parles avec des mecs de l’autre coté du monde tu vois leurs vidéos… ca fait chier d’être vieux et de n’avoir plus que quelques années devant soi … profitez (pour le djeunes) hahaha
enfin voilà mes bidouilles de oui oui
le recycleur c’est cela :


et mon second giro c’est cela :


bref faut bien des tarés comme nous non ?
haha
whaou c’est plutôt impressionnant tes réalisations.
je ne suis pas le mieux placé pour t’en parler, d’autres maîtrise bcp mieux le vesc que moi mais ils me corrigeront si je te dis des conneries.
sur le vesc tu rentres
-ton motor current max en fonction de la puissance de ton moteur / intensité de ta batterie. par exemple j’ai 2 moteurs 63100 de 4000w ( spec constructeur)je roule avec une batterie ( 12s de 44.4v) j’ai rentré 90A par moteur. ca me fait 4000w.
cette valeur peut etre augmentée car quand tu regarde les courbes d’intensité du moteur sur les log de vesc tool tu te rends compte que même sur des démarrage en côte sévère tu montes a 90 A qu’une fraction de seconde. c’est juste un pic et ça n’a pas le temp d’abîmer ton moteur.
- ton moteur current brake mais ça je pense que ça t’intéresse peu
- ton absolute maximum current c’est le pic de courant max au dessus du quel ton vesc coupe pour se mettre en protection
mais également
-ton batterie current max qui doit etre inf ou egal a celui du moteur
-ton batterie current max regen cest la quantite de courant que tu renvoies dans ta batterie au moment du freinage.
apres il y a plein d’option qu’on utilise pas en skate genre les erpm, on gere ça avec nos transmissions. les max wattages…
il ne faut pas oublier quand même qu’un vesc ca coupe avant de cramer que ce soit si tu demandes des intensités trops importantes, si la température de ton moteur ou de ton vesc monte trop haut alors je sais pas bien si ça peut être un contrôleur a mettre dans un appareil qui vole😅.
ha si il y a un truc qui me surprend quand tu dis un moteur de 8000w il me semble que ca fait peu.
sur ce site chinois ils parlent de 50kw pour un paramoteur.
certains parlent de courant nominal et d’autres de courrant max , c’est ce qui pourrait expliquer une telle différence mais au cas où…
ha si un dernier truc pour l’instant les vesc ne permettent pas de gerer des intensités supérieure a 150/ 200A ni des tensions supérieures a 100v. il faut encore attendre un peu pour ça enfin je l’espère.
salut,
bien vu pour les 8000w …si je pouvais faire voler mon engin de 236 kilos, 2 passagers et 80 litres de benzine avec 8000w cela fait longtemps que j’aurais eu le prix nobel de physique fondamentale …
un rotor d’autogire tourne tout seul du fait du vent relatif qu’il reçoit quand le moteur thermique le propulse en avant , le rotor produit alors la portance (comme une aile d’avion)
c’est un peu comme un moulint à vent … de loin … quand le vent souffle il tourne.
mais un rotor d’autogire est constitué de 2 ailes (comme celles des avions), avec un profil aerodynamique
quand ces ailes recoivent du vent qui les attaque elles produisent une force aerodynamique résultante (portance), mais qui est légèrement orientée en avant du profil … c’est ce qui fait tourner le rotor tout seul sans aucun moteur(autorotation) comme un hélicoptère en panne moteur qui descend tranquille se poser sur les champs ( quand il y en a…)
tapes hélicoptère autorotation dans youtube tu vas en voir plein des hélicos qui se posent moteur coupé…
les rotors d’autogires ne sont pas entrainés par un moteur lorsqu’ils volent (tu as bien vu que 8000 w ne seraient pas suffisants bien entendu)
mais pour que cette autorotation se fasse il faut la « démarrer » en pré-lançant le rotor , giro à l’arrêt avant de décoller avec : soit un système mécanique , soit hydraulique, soit electrique
si tu avançais sur la piste rotor immobile , à la différence du moulin à vent , le rotor ne se mettrait pas à tourner, il faut amorçer le phénomène aerodynamique pour que la portance se crée sur l’extrado des pales, et ensuite quand tu décolles le phénomène s’amplifie parce que le vent relatif augmente avec la vitesse de l’engin propulsé par un moteur termique et une hélice placée dans ton dos.
un autogire décolle comme un avion en roulant sur la piste rotor en positif (il est penché en arrière en français) et si tu l’as prélancé, quand tu avances il prend des tours (350) et comme le giro a de la vitesse, les deux créent un portance … le moteur de 8000w est juste utilisé 1 minute à l’arrêt avant de mettre les gaz et de roule sur la piste … dés que tu mets les gaz il est coupé , donc pas de probleme de sécurité ne te bile pas
personne ne le fait encore vraiment en électrique pour les raisons objet de ma question centrale
tu dis que dans un démarrage en cote tu ne dépasses pas bien plus que 90 ampères OK j’enregistre
ceci dit 90 ampères c’est un sacré courant quand même
que se passerait t’il si tu demarrais en côte en ayant pris le double de ton poids avec la même accélération ?
newton (ce britton !) nous dit F = M x A , F c’est la force donc le couple donc l’intensité dans ton moteur) M la masse, A l’accélération
donc pour une même accélération tu aurais besoin de deux fois plus de force (ici de couple) pour la même accélération donc 180 A
que ferait ton contrôleur dans ce cas ?
autrement dit est-ce que ton vesc ne dépasse pas 90 A sauf petits pics parce qu’il limite le courant max (genre il en donne pas plus mais il en donne toujours en fait) ou bien n’as tu pas dépassé les 90 ampères parce que tu n’as pas accéléré suffisament fort pour créer un couple résistant tel que ces plus de 90 Ampères ont été nécéssaires ? (l’histoire de l’oeuf et de la poule)
je penche pour la première explication, parce que l’intertie est une force très élevée …quel que soit le poids et la pente si tu pouvais accélérer comme tu veux sans régulation de courant je pense que tu brulerait tout
au démarrage le moteur electrique est à bas régime et c’est là que ses bobines reçoivent le plus de courant.
j’y pige pas grand chose mais je pense que quand le moteur electrique tourne déjà vite, le courant est naturellement limité puisque à chaque changement angulaire le courant est coupé dans un bobine et envoyé dans la suivante… (je sais pas m’expliquer) mais cela doit limiter les emmerdes
en revanche au démarrage quand ton moteur est à bas régime, tu dois être proche du court circuit car le courant circule plus longtemps dans une même bobine …
je me trompe peut -être … juste que de d’expérience me motre que l’accélération produit un couple tel que les moteurs grillent a bas régime , ou les controleurs.
en fait avec ta commande dans la main tu ne peux pas limiter ton accélération à une valeur limite qui te mettrait à l’abris de tour brûler (c’est trop sensible), c’est donc bien la régulation du courant par le contrôleur qui doit faire survivre vos engins.
c’est cela que je voudrais vérifier … mais je vois pas bien comment il pourrait en être autrement en fait.
Alors nos moteurs sont des brushless triphasés. Le vesc génére 3 pseudo sinus plus ou moins propres (mode bldc,foc…) a base de pulses de courant (pwm) dont il module le rapport cyclique en continu suivant ta consigne (potentiometre ou autre) et sans depasser les bridages que tu as mis .(courant max,Pmax,Vmax) . Apres cest comme une moto puissante . Tu ecrases la poignée, tu t’envole . Faut doser . Pour tout demarrage en charge, en cote etc… le courant va souvent au max le temps que le.moteur atteigne une certaine vitesse et genere de la fcem .
A larret,sans limitation,Imoteur=Vbatt/Rbobinage
Plus vite: Imoteur=(Vbatt-Vfcem)/Rbobinage
Dans ton cas,il existe des controleurs tout prets et aussi configurables(de memoire fery?)pour des courants enormes et piloter des moteurs de moto ou scooters de 10~20Kv . Le vesc ne sera peut etre pas suffisant.
Merci beaucoup … tu peux pas savoir ce que c’est agréable de discuter avec des gens qui vivent les brushless et les controleurs au quoditien et pas simplement dans la théorie
donc merci merci et encore merci
je pense que dans mon cas je n’ai ni travaillé avec un controleur qui limitait le flux de courant de quelque manière que ce soit, ni travaillé sur la cause de la sur-intensité (contrôle de l’accélération)
j’ai simplement monté un testeur de servo sur un gros controleur de drône qui ne comporte pas paramétrage limitant l’intensité
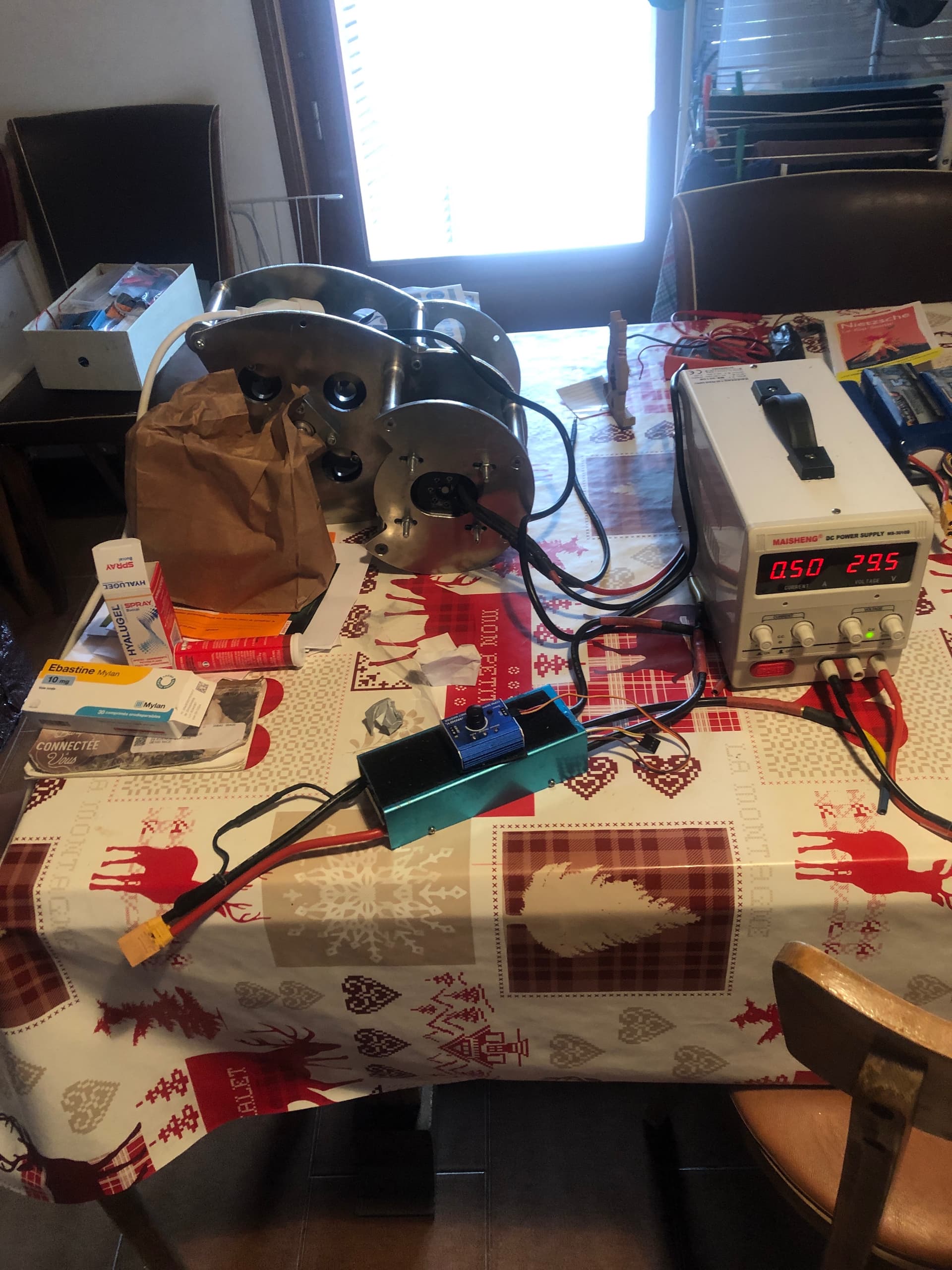
Donc quand j’ai tourné le potar à la main premièrement cela démarre trés fort à cause du fait que c’est un moteur sans sensor (donc il faut un burst de courant pour qu’ensuite le controleur puise detecter les signaux de back emf) et en plus aprés il est impossible de controler finement l’accélération avec un potar… donc quand tu tournes le truc trop fort ben ca pompe trop de courant et tout grille
et comme tu dis c’est comme une moto lourde et puissante , sauf que là dans la moto tu sens l’accélération physiquement alors que planqué sous le rotor tu sens rien … (et je n’ai même pas utilisé de pince ampèremétrique rien du tour … grrr)
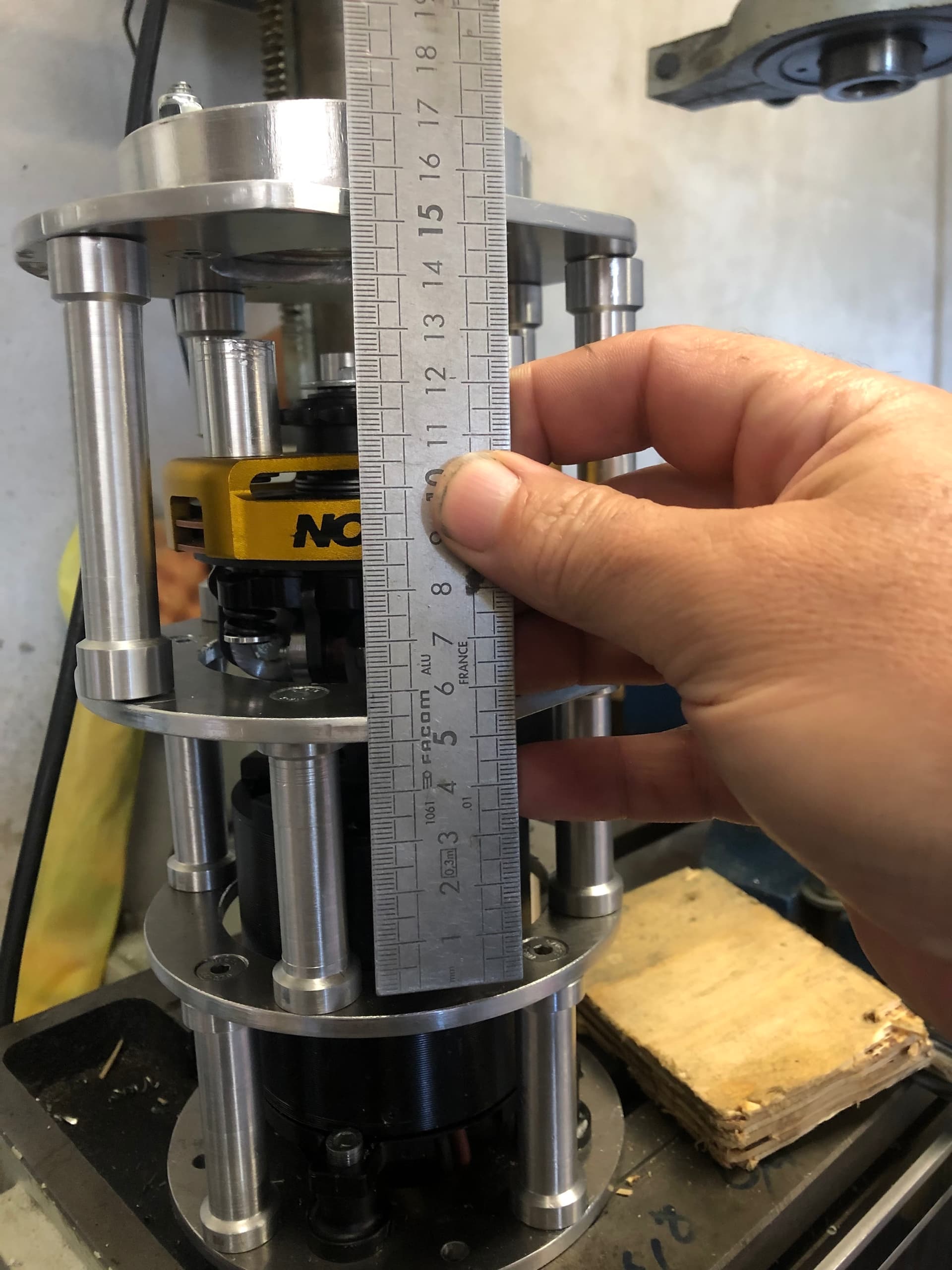
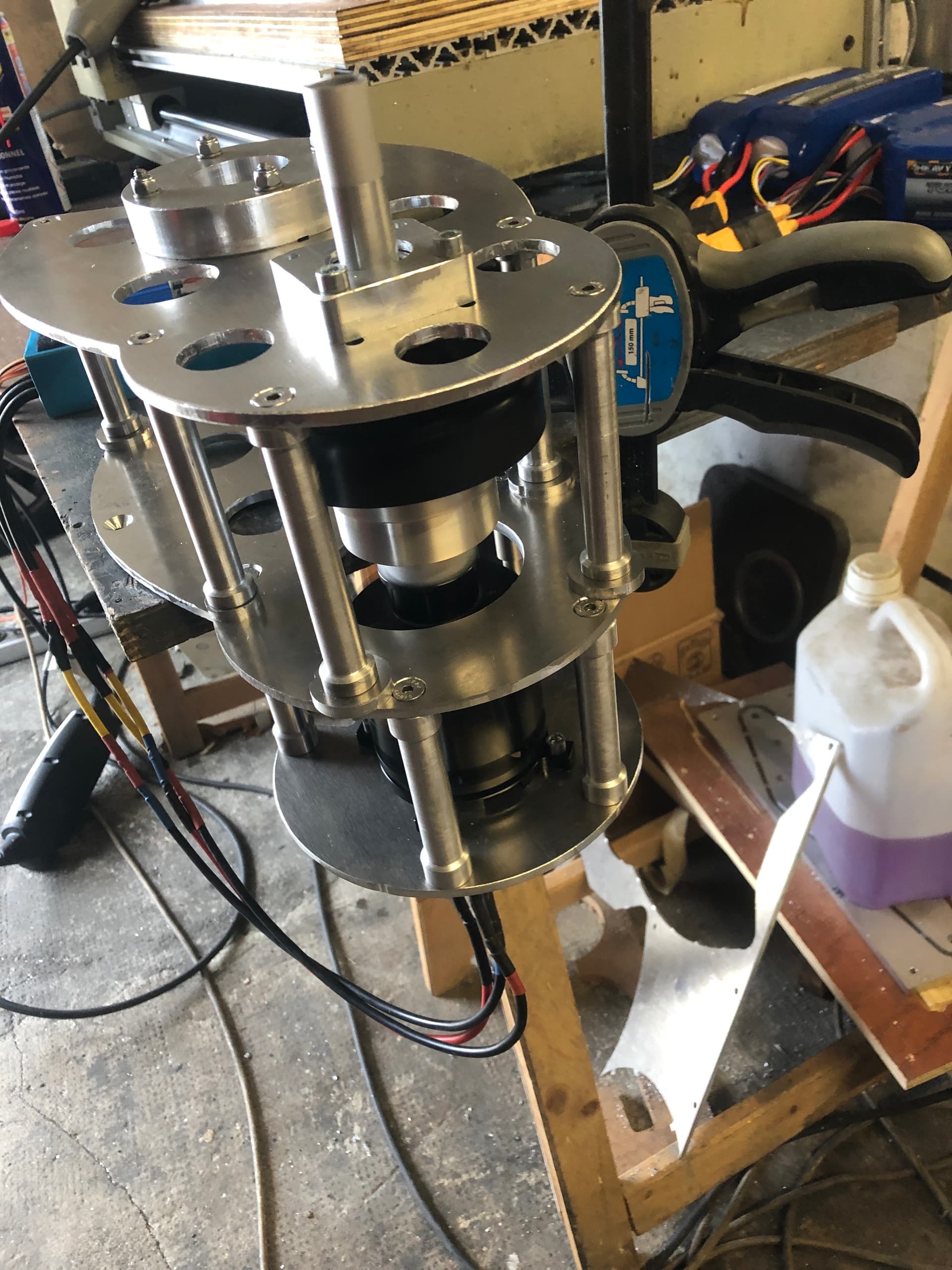
donc je pouvais pas monitorer l’intensité … accroupi sous le rotor soucieux de ne pas tout me prendre dans la tronche … hahaha le banc de test c’est cela

les batteries sont dans le sac dessous, y a un gars qui regarde le régime rotor, l’autre qui regarde le rotor (pour voir si tout es ok) et un qui essaye de tourner le potar doucement … les pieds nicklés koi …
j’aurais du ne serais ce que controler l’accélération avec des tempos avec un arduino comme j’avais fait l’années précédentes, c’est une video non listée que j’avais faite pour un pote qui faisait aussi le même truc

donc bon je suis allé trop vite
je vais donc bosse cette fois …
kel kon
Il te faudrait un moteur sensored.
Le pilotage est plus fin,et sans acoups a bas régime.
Et un gros vesc pour avoir toute les data en temps reel . Quite a le modifier en mettant des mosfets enormes en externe bien refroidis . Pour tes 200~300tr/min et tes kv moteur,pas besoin d’une tension de batterie tres élevée à mon avis.
Et sur vesc,tu peux regler tout les paramètres de demarrage et courbe d’acceleration/freinage :Lineaire,log,anti-log…
Pour revenir a ton futur skate ,je te conseille du pneu gonflable 7 ou 8 pouces.ca passe partout suivant la pression…
oui, absolument,
pas facile de le voir sur les photos mais j’ai mis un embrayage au dessus du moteur sensorless pour limiter le shock du démarrage .
c’est le truc noir (un embrayage centrifuge de kart)

avec un moteur à sensor il n’y aurait pas ce chock de démarrage et je n’aurais plus besoin de cet enbrayage en effet…
je peux commander le même moteur avec sensor chez les chinois
pour le vesc pas besoin d’avoir plus que le 100/250
je n’aurai qu’à limiter l’accélération et je n’aurais pas de problème
à 220 tours rotor je suis à 4000w au moteur, sonc 80 ampèrres, c’est les accelerations qui font monter la sauce pas la trainée aerodynamique
je pense qu’avec notres discussion je tiens le bon bout .
je commande le truc ce soir … et on verra bien
merci encore
en même temps je vais me mettre au skate mais je vais poser les questions dans la section idoine du forum
merci encore
Pas moyen d’ajouter des capteurs hall? Parfois lemplacement est prévu dans les moteurs sensorless.
Sinon tu en colle entre les poles et le vesc les detectera
Pour ton cas precis,tu as le forum officiel vesc où des gars font des grosses betises comme toi . En anglais, mais il y a des grosses pointures du code vesc .toujours utile…
je vais acheter le controleur, donner les ordres d’acceleration au controleur avec l’arduino et y aller molo et je pense que ca va passer
pour installer des sensors a effet hall pourquoi pas . sinon je commande un moteur et voila
j’en suis plus la
quand a aller poser des questions con sur le forum vesc, je l’ai déjà fait , pas réponse , mes questions n’ayant aucune valeur …
Sur le forum vesc ils sont pointus sur des dysfonctionnements,mais faut ammener des billes style oscillogrammes,valeurs de reglage , bref, utiles quand tu as bien degrossi le pb et que parles leur language …
je suis parfaitement d’accord, poser des questions sur des principes de bases ne constitue pas forcément une démarche qui pourrait conourrir à faire avancer un projet open source style Vesc …
Tiens à propos de notre discussion j’ai trouvé un messagde 2010 sur un forum qui fait bien la différence entre les contrôleurs de modèles réduits à hélice et les controleurs de vélos electriques et autre Ve légers
désolé c’est en Anglais mais c’est vraiment instructif :
" The main physical differences are (btw RC ESCs and Bike ESC):
- RC ESCs are usually sensoreless, ebike ones usually use Hall sensors
- RC ESCs use large arrays of low voltage FETs, with minimal heatsinking, ebike ones use smaller numbers of higher voltage FETs fitted to moderately sized heatsinks.
- RC ESCs rarely have true current limiting, the majority have no means of measuring current (there are one or two high end exceptions) whereas ebike ones all implement some form of current limiting.
The practical differences are:
-
Because of the focus on low voltage, high current, there are few RC ESCs that will run above about 50V.
-
RC ESCs tend to be designed for maximum torque (which corresponds to maximum current) at maximum rpm, ebike ones have to be able to deliver maximum torque at any speed. This means that, without effective current limiting, some RC ESCs will attempt to generate very high phase currents at low rpm, high throttle. Switching these high currents then generates voltage spikes on the supply rails that the commutation capacitors cannot cope with, leading to either commutation capacitor failure from excessive ripple current or FET failure from the high voltage spikes.
-
Ebikes controllers always have current limiting, so they shut down the PWM duty cycle, even though the throttle may be demanding 100%, when the current exceeds the set limit. This has the effect of limiting phase currents to values that the controller components can handle, whilst still delivering maximum torque. In effect, an ebike controller will safely deliver it’s set maximum torque (current) from zero to full rpm.
-
Hall sensors allow better control of commutation at start up and low rpm, as they are not speed sensitive. RC ESCs usually rely on the back EMF of the non-powered motor phase wire to determine rotor position and this signal is very low at low speeds and non-existent at start up. The effect of Hall sensors is to increase starting and very low speed torque, by allowing the controller to accurately time the phase outputs from a virtual standstill.
-
Because RC ESCs are designed for use with PPM signals from radio receivers they don’t have a throttle input that connects directly to the voltage output throttles common on ebikes, so some sort of converter is needed to turn the throttle voltage into the PPM signal the ESC needs. Ebike controllers will accept Hall or resistive throttles directly.
The two different controller types are essentially very similar, but optimised for different roles. Model aircraft and boats have a cube law relationship between torque and rpm, so there is no need for an RC ESC designed for use with them to be able to handle high current at low rpm. Ebikes need high torque at near zero rpm to accelerate quickly and have good hill climbing performance, and will most probably not run at maximum torque, maximum rpm very often.
Some high end RC ESCs do have features that mean they can be adapted to ebike use more reliably, but there remains the voltage limit. An advantage of high end RC ESCs is that they tend to be designed in the West (principally places like the US and Germany) so we have better access to the design limitations and more information on what they will and won’t do. Ebike controllers are virtually all designed and manufactured in China, for their indigenous ebike market, so we rarely get more than a glimpse of the way they work.
The only RC ESCs that have current limiting that is programmable (and even then I think they use FET Rdson current measurement, which is OK but very temperature dependent) are the Castle Creations HV series, plus maybe one or two of the very high end European ESCs. I’ve not seen any sign of a current measurement capability on any of the cheap Chinese ESCs."
les principales différences entre les controleur de modèles réduits et les controleurs de vélos electriques sont :
-
les controleurs de modèles réduits sont le plus souvent des « sensor less »; ceux des vélos electriques utilisent des sensors à effet hall
-
les controleurs de modèles réduits utilisent de grandes matrices de de FET de basse tension de petits radiateurs, les velos electriques utilisent un nombre inférieur de FET de plus haute tension avec des radiateurs plus grands
-
les controleurs de modèles réduits possèdent rarement de vrai système de limitation de courant, la majorité n’ont même pas de système de mesure du courant (à quelques exceptions près), les contrôleurs de vélo ont tous un système de limitation de courant d’une forme ou d’une autre.
les différences pratiques sont les suivantes:
-
du fait de l’utilisation de courant de faible tension, peu de contrôleurs de modèles réduits fonctionnent au dessus de 50V
-
les controleurs de vélo ont tendance à être conçus pour un couple maximum au régime maximum, les contrôleurs de vélos sont conçus pour donner un couple les plus élévé possible à tous les régimes, cela veut dire que sans système de de limitation de courant certains conrôleur de modèles réduits vont essayer de produire des phase de courant très élevées à bas régime et haute ouverture de « gaz »
l’interruption de ces haut courants génère des pic de tension sur les rails d’alimentation que les condensateurs de commutation ne peuvent supporter, produisant soit une defaillance des condensateurs de commutation du fait d’excessifs courants de décharge ou une défaillance des FET du fait des pics de tension.
- les contrôleurs de vélo ont des sytèmes de limitation de courant, quand il y a un excés de courant ils coupent rapport cyclique PWM, même si la manette des gaz est à 100%
cela a pour effet de limiter les phases de courant à des valeurs que le controleur peut supporter, tout en fournissant le couple le plus élévé possible, en effet une controleur de vélo va fournir un couple maximun de 0 à régime moteur maximum
- les sensors à effet hall vont permettre une meilleure commutation au démarrage et à bas régime, ils ne sont pas sensibles à la vitesse. les controleurs de modèles réduits se fondent sur le signal de back emf de la pahse du moteur non alimentée, pour déderminer la position du rotor et ce signal de back EMF est très faible régime et inexistant au démarrage,
les sensors à effet hal permettent d’augmenter le couple à bas régime et au démarrage en permettant au contrôleur de rythmer de façon précise les phases d’alimentation par référence à un point mort virtuel.
Les deux types de contrôleurs différents sont essentiellement très similaires, mais optimisés pour des rôles différents.
Les modèles réduits d’avions et de bateaux ont appliquent progression cubique entre le couple et le régime, il n’est donc pas nécessaire d’avoir un contrôleur conçu pour être utilisé avec eux pour pouvoir gérer un courant élevé à bas régime.
Les vélos électriques ont besoin d’un couple élevé à un régime proche de zéro pour accélérer rapidement et avoir de bonnes performances en montée, et ne fonctionneront très probablement pas au couple maximal, au régime maximal.