


- Assembler les cables d’alimentation chaque VESC positif entre eux et négatifs entre eux afin d’avoir deux cables en Y qui aillent vers la source d’alimentation (batterie)
- Relier les fils moteurs de chaque VESCs à chaque moteur
- Branchez votre cable PPM du VESC ID 0 à votre récepteur
- Identifier avec un stylo ou marqueur chaque VESC afin de ne pas vous planter. Marquez ID 1 (SLAVE) et ID 0 (MASTER)
- Vérifier bien vos branchements et isolez bien chaque VESC et chaque cables (alim, moteur etc)
- Ne pas connecter le CANBUS pour le moment
- Ne mettez aucune charge sur vos moteurs (en somme ne relier aucune courroie ni rien, moteur à vide)
- Branchez le cable USB au VESC ID 0
- Lancez BLDC Tool qui correspond à votre firmware (ici 1.14 pour moi)
- Branchez votre batterie, votre récepteur doit s’allumer, vos VESC aussi.
- Changer l’adresse de connection de votre port afin de pouvoir vous connecter au VESC pour le programmer (chez moi /dev/tty.usbmodem261 est par défaut et cela fonctionne)
- Cliquez sur Connect et vous devriez avoir en bas écrit…Connected (youpi!)

Passons maintenant à la configuration du VESC ID 0 (MASTER)
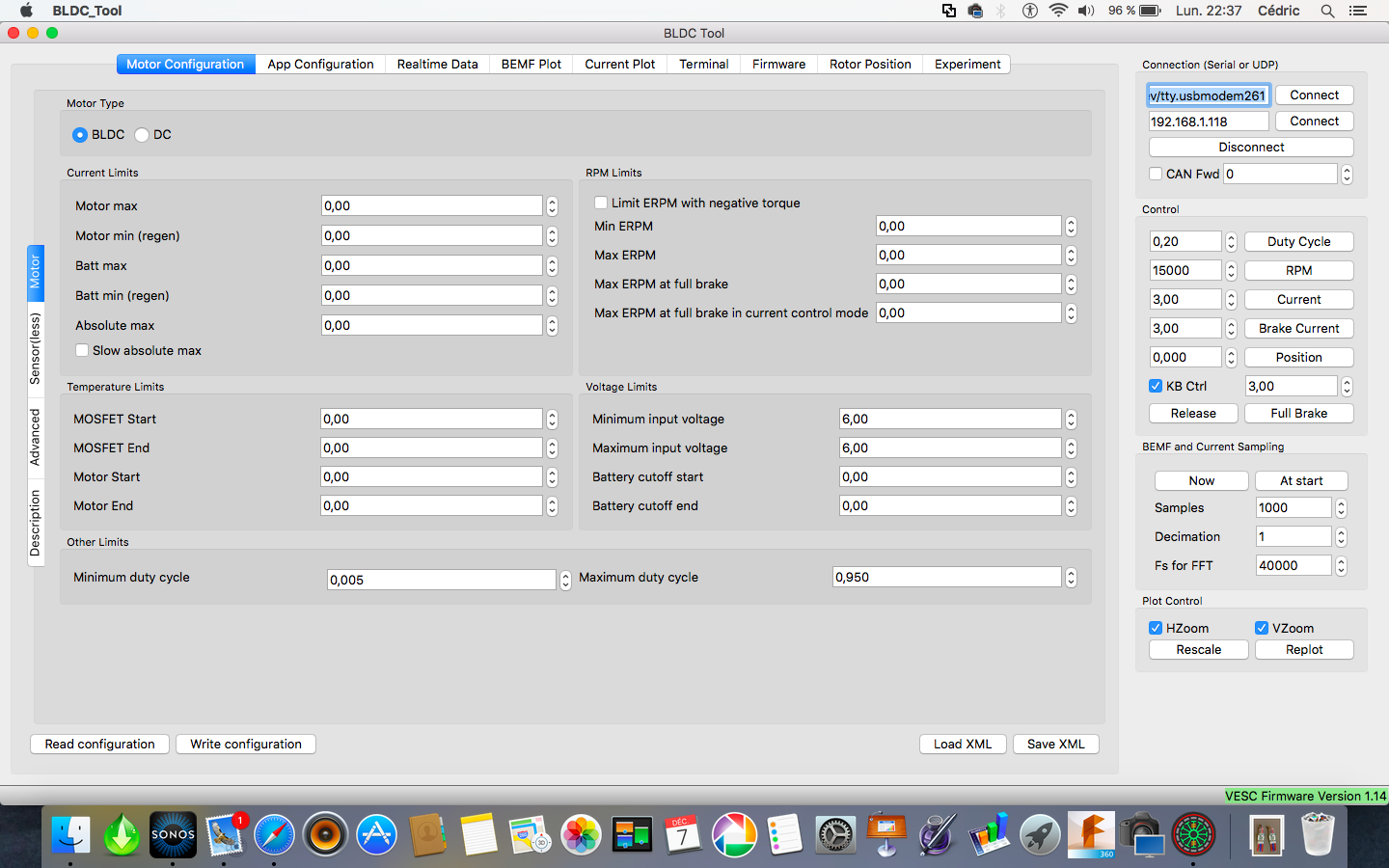
- Cliquez sur READ CONFIGURATION (afin de charger la configuration - à faire quand vous allez dans les onglets pour éviter de modifier une conf qui n’est pas celle chargée)
- Changer la valeur Current Limits/Motor Max par celle de votre moteur (ici moi c’est 70A)
- Modifiez les quatre valeurs Voltage Limits afin de régler votre voltage maximum (j’ai mis 57V car je suis en 12S sinon il affiche un message fault de type overvoltage) et votre voltage min en input. Puis réglez les valeurs du LVC (Low Voltage Cutoff), en somme… la sécurité de vos lipos. Mon cut off démarre à 3.4V x 12 = 40.80 et s’arrête à 3.2V x 12 = 38.40. Pas compliqué !
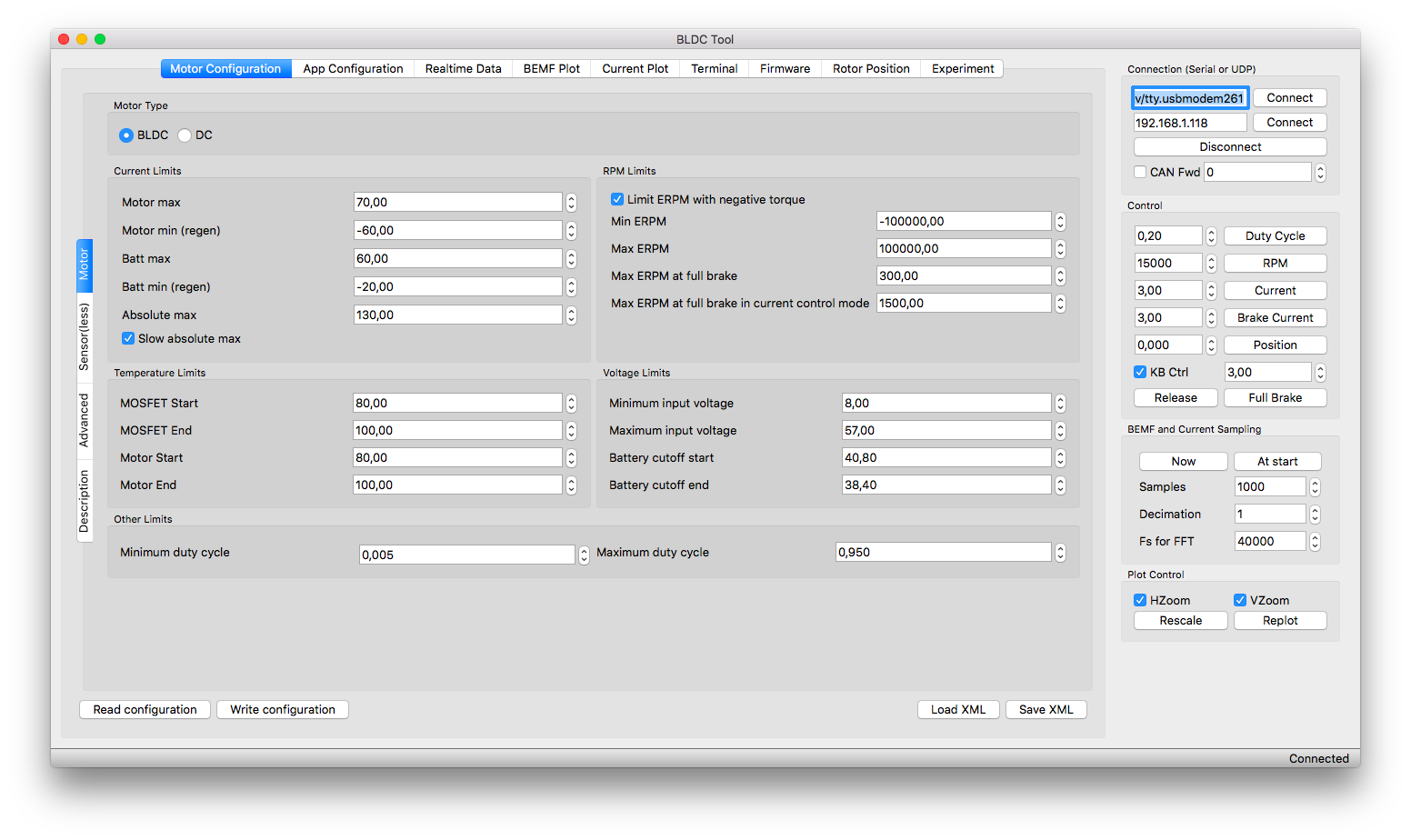
- Allez dans l’onglet Sensor(less)
- Cliquez sur READ CONFIGURATION
- Cliquez sur START DETECTION, votre moteur va tourner et il va vous donner les valeurs INTEGRATOR LIMIT et BEMF COUPLING à mettre (il vous faut les arrondir à 5 et à 100). Moi cela donne 120 en integrator et 1600 en BEMF COUPLING
- Cliquez sur WRITE CONFIGURATION
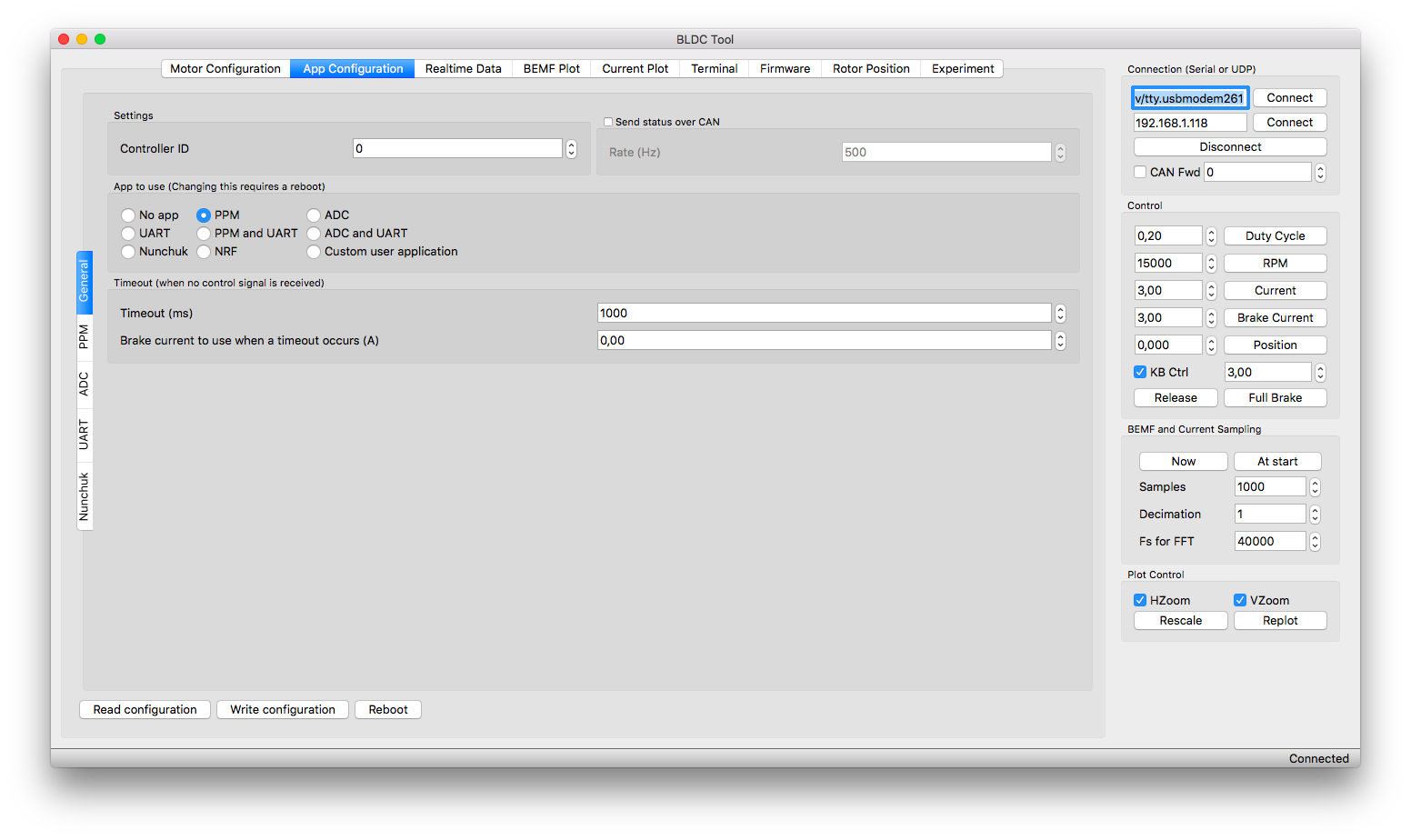
Allez dans l’onglet App Configuration et dans la partie Général
- Cliquez sur READ CONFIGURATION
- Controller ID à mettre à 0 (c’est le master n’oubliez pas)
- NE PAS COCHER Send status over can (on le fera sur le SLAVE uniquement)
- Cocher PPM
- Cliquez Write configuration
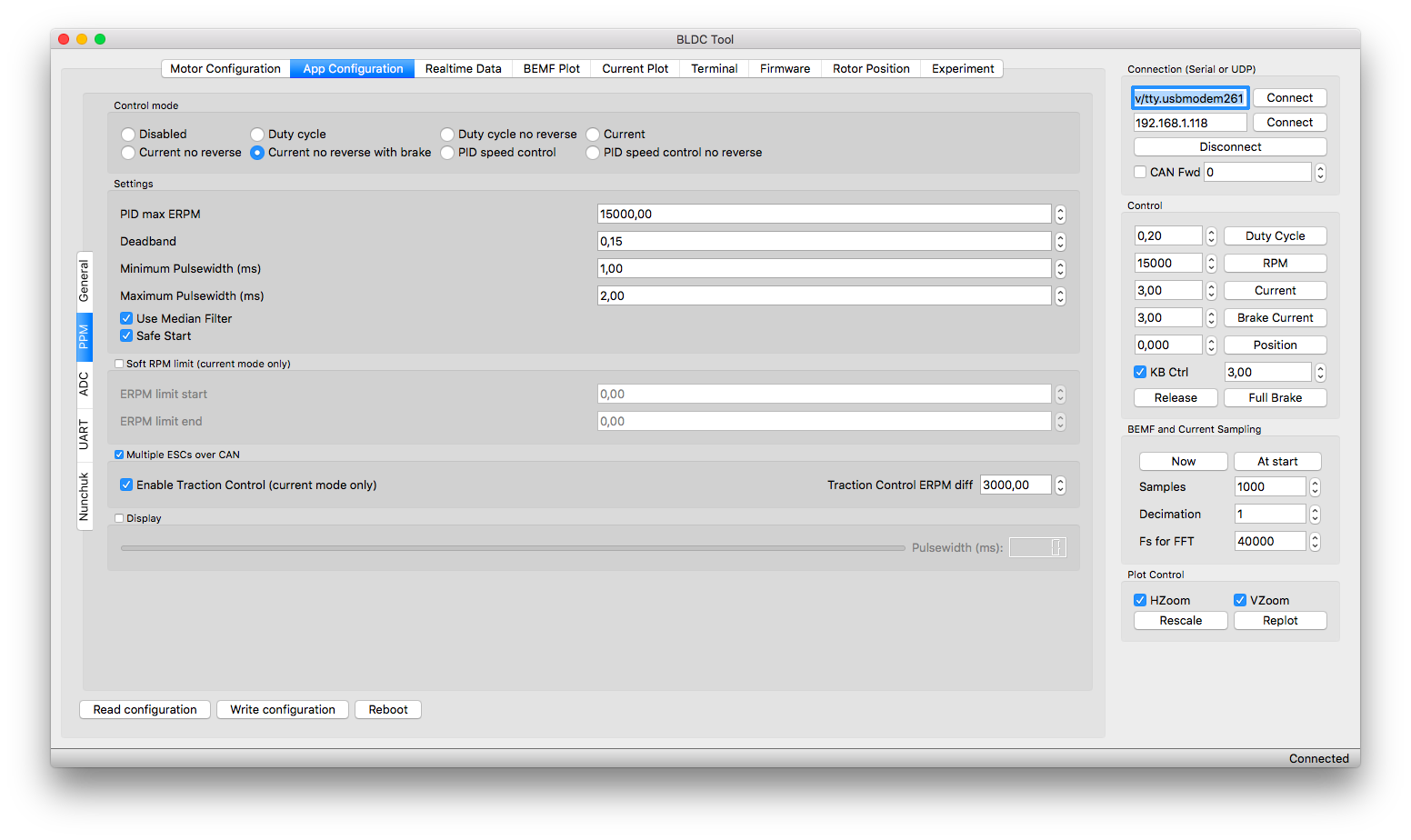
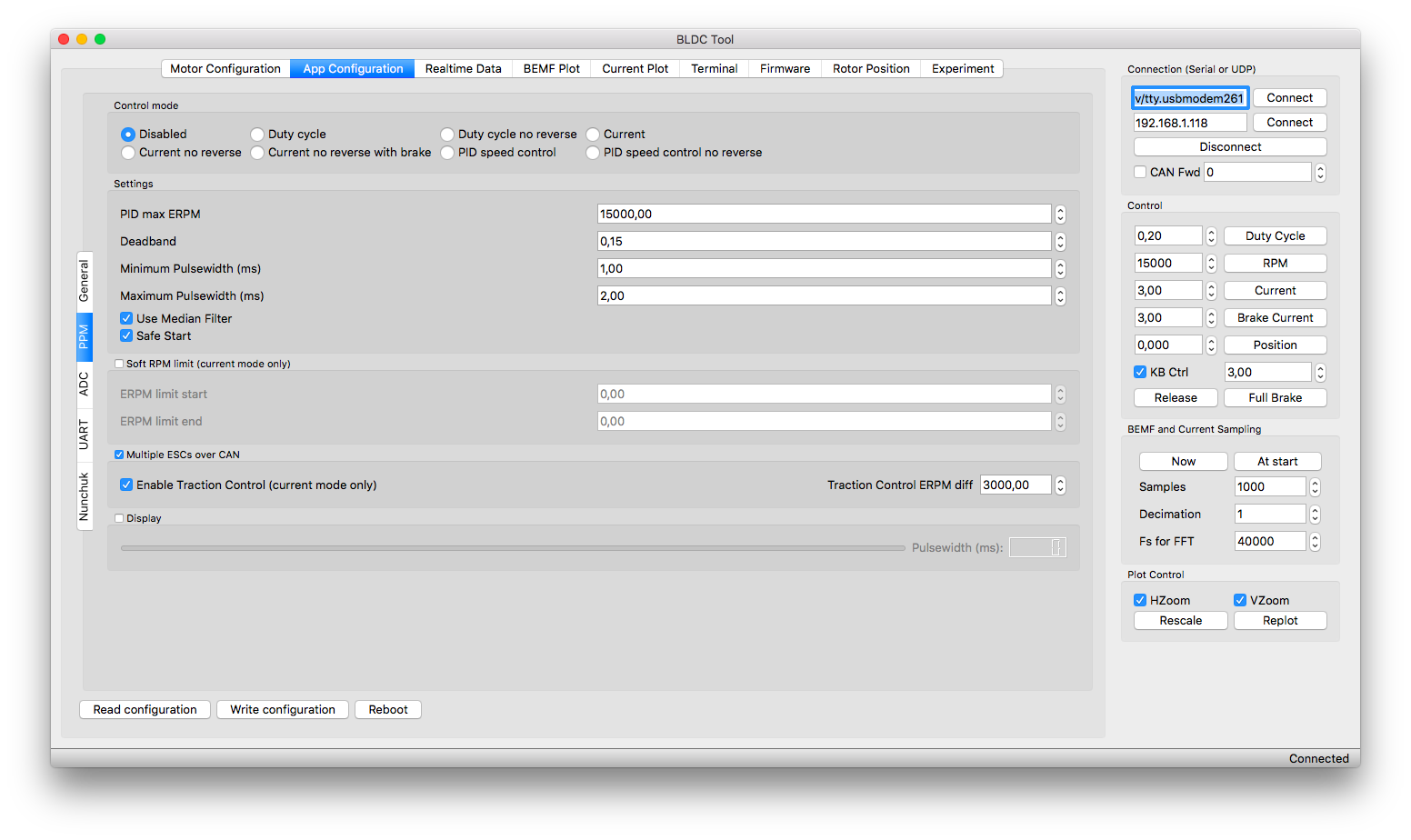
- Dans l’onglet PPM, cocher current no reverse with brake, cocher Multiple ESCs over CAN et ENABLE TRACTION CONTROL
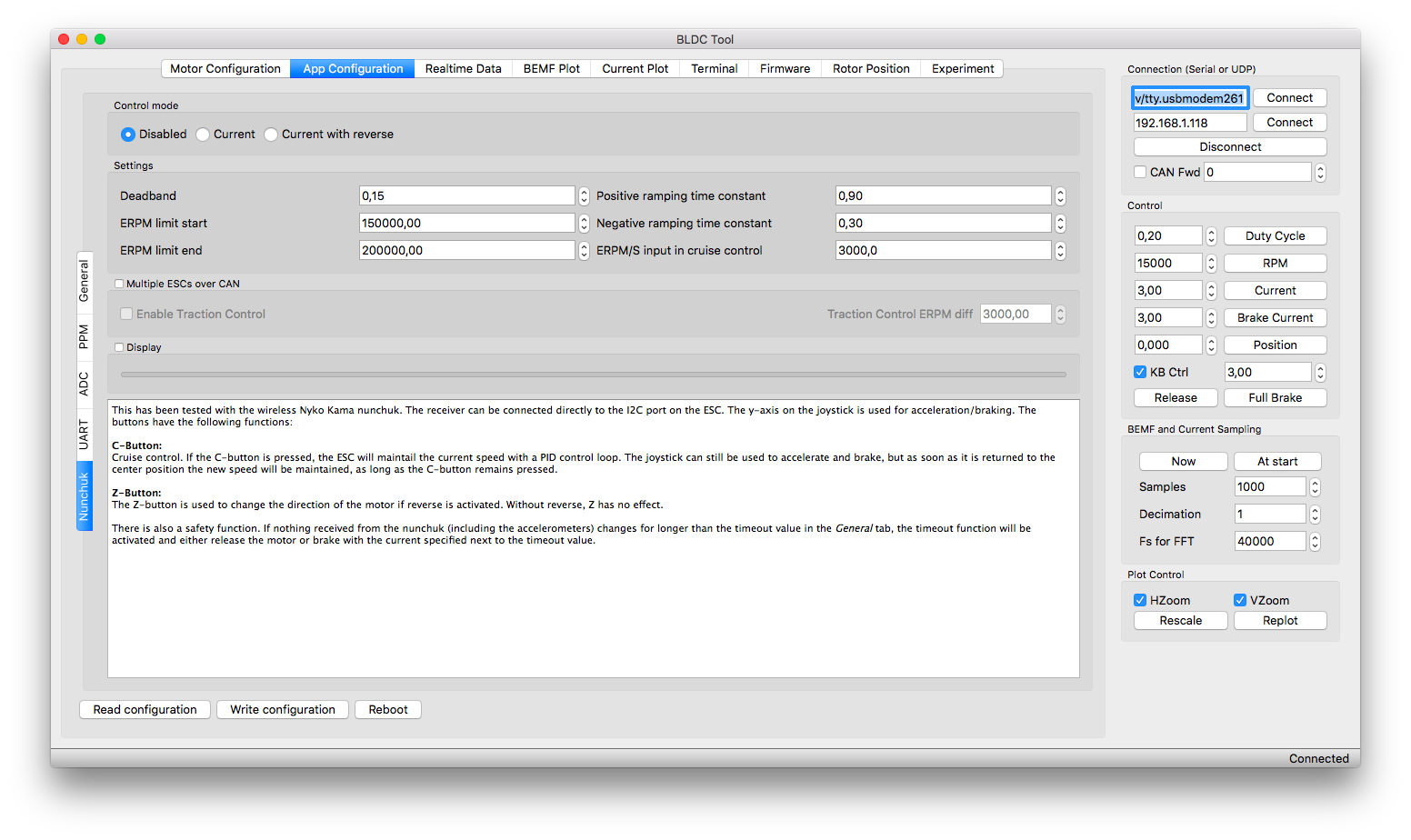
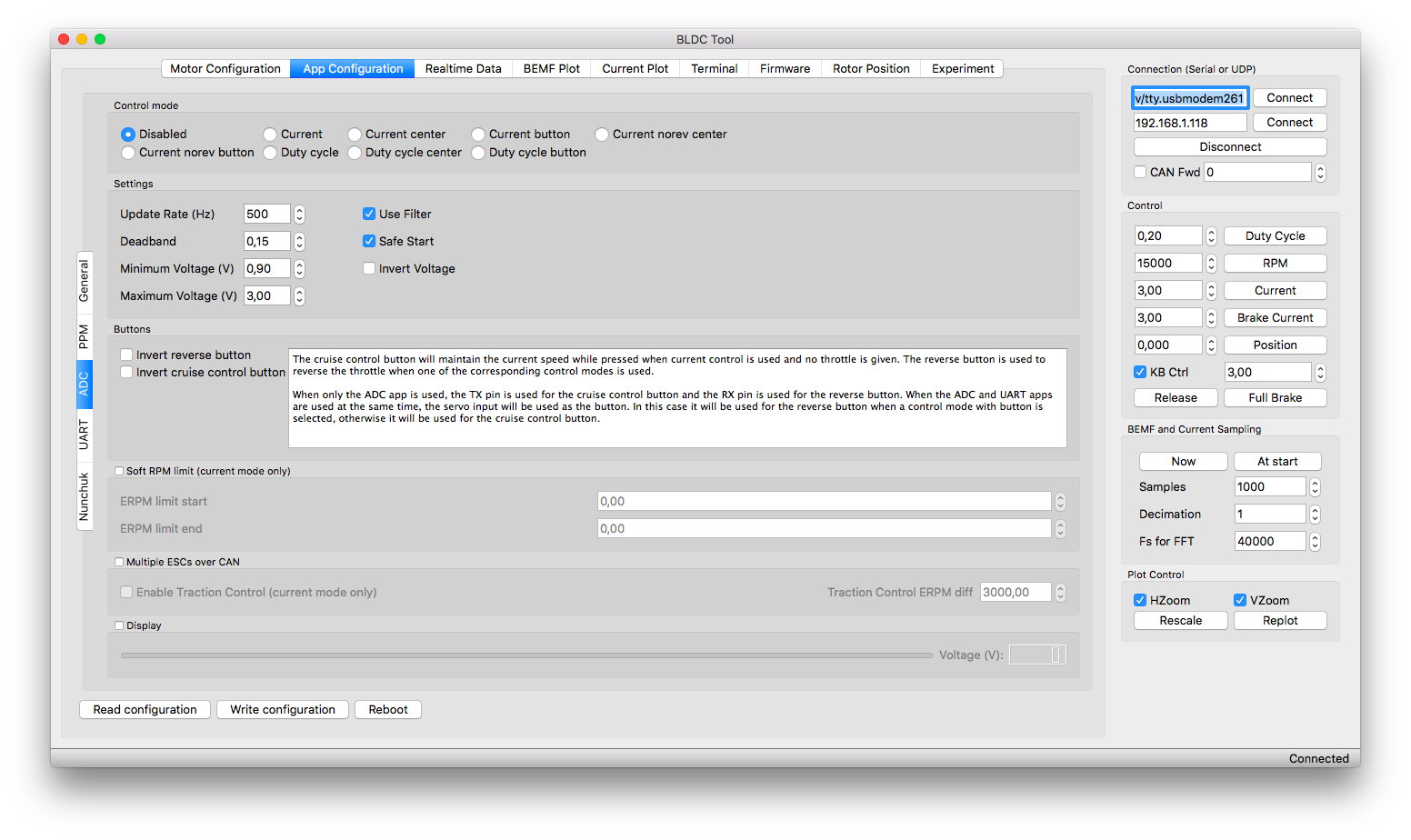
- Vérifier que dans l’onglet ART et Nunchuck, le control mode est à disabled (normal vous utilisez le PPM !)
- Cliquez WRITE CONFIGURATION
Bravo, c’est presque fini !

Allons direct à la configuration du SLAVE (ID 1) qui recevra ses instructions via le CANBUS que vous connecterez plus tard.
- Brancher le cable USB sur l’autre VESC
- Cliquez Connect
- Cliquez sur READ CONFIGURATION (afin de charger la configuration - à faire quand vous allez dans les onglets pour éviter de modifier une conf qui n’est pas celle chargée)
- Changer la valeur Current Limits/Motor Max par celle de votre moteur (ici moi c’est 70A)
- Modifiez les quatre valeurs Voltage Limits afin de régler votre voltage maximum (j’ai mis 57V car je suis en 12S sinon il affiche un message fault de type overvoltage) et votre voltage min en input. Puis réglez les valeurs du LVC (Low Voltage Cutoff), en somme… la sécurité de vos lipos. Mon cut off démarre à 3.4V x 12 = 40.80 et s’arrête à 3.2V x 12 = 38.40. Pas compliqué !
- Allez dans l’onglet Sensor(less)
- Cliquez sur READ CONFIGURATION
- Cliquez sur START DETECTION, votre moteur va tourner et il va vous donner les valeurs INTEGRATOR LIMIT et BEMF COUPLING à mettre (il vous faut les arrondir à 5 et à 100). Moi cela donne 120 en integrator et 1600 en BEMF COUPLING
- Cliquez sur WRITE CONFIGURATION
Et oui, comme ici on a paramètré les valeurs de voltage et de moteur… c’est pareil  il faut mettre les même que sur le VESC ID 0 (MASTER)
il faut mettre les même que sur le VESC ID 0 (MASTER)
Maintenant cela va changer… mais c’est presque fini !
- Allez direct dans l’onglet App Configuration
- Cliquez sur READ CONFIGURATION
- Changer le controller ID à mettre 1 (normal c’est le MASTER)
- Cocher Send status over CAN
- Cocher sur No App afin de désactiver cette option car il n’y en a pas besoin sur le SLAVE
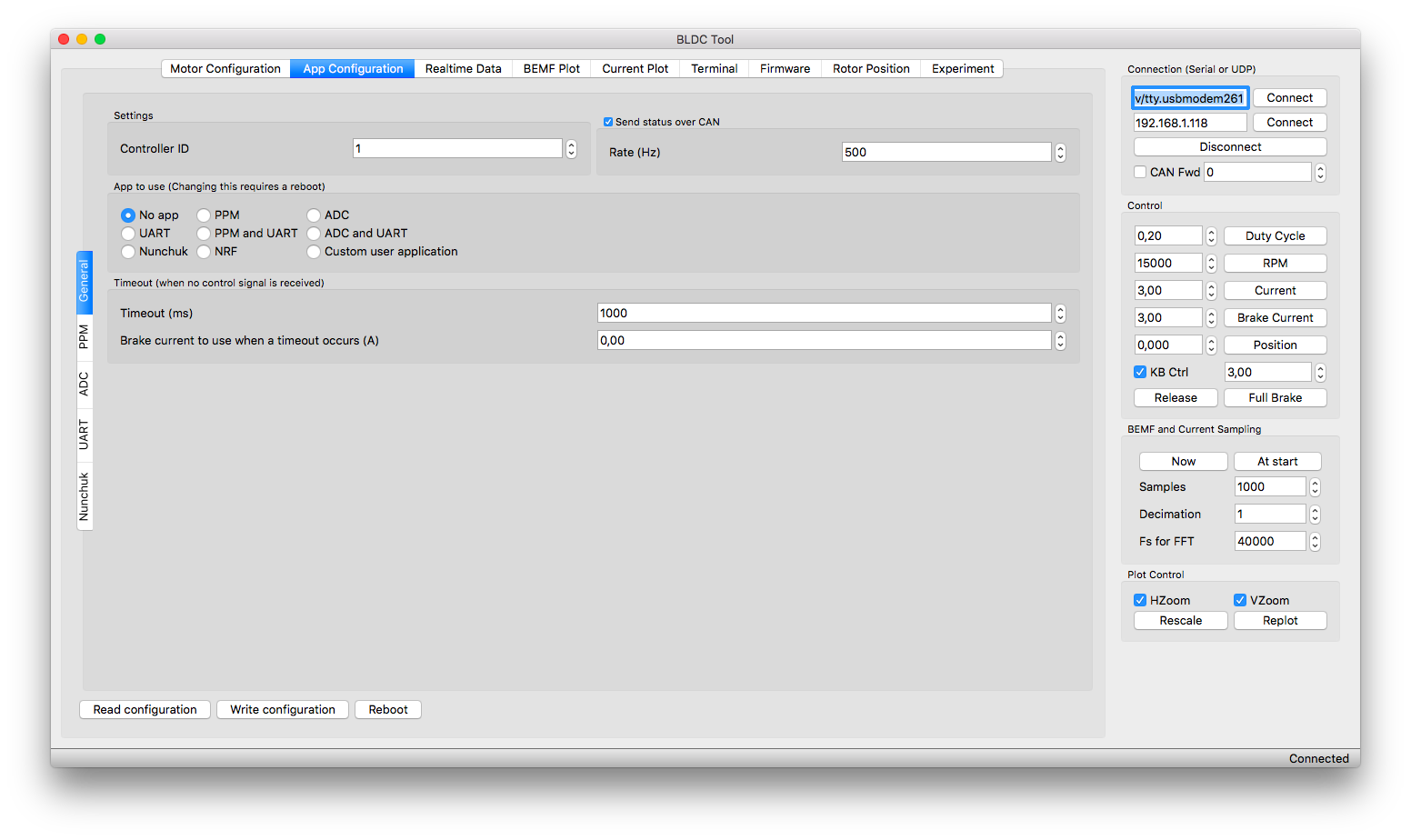
- Désactivez le PPM, ADC, Nunchuck (Disable) car comme déjà dit… il n’y a pas besoin de paramétrer de communication à part le CANBUS
Et c’est fini !
- Débranchez votre cable USB, votre cable de batterie
- connectez votre cable CANBUS entre les deux VESC (les deux pin du milieu sur chaque VESC)
- allumez votre émetteur
- alimentez via la batterie…
- attendez 2 secondes … et mettez un coup de gachette… et écoutez le son des VESCs.

Bravo… vous verrez le plus difficile est de le faire une fois; ensuite vous optimiserez les paramètres tel que le startup boost (ne jamais dépasser 0,090)
PS: faites attention à votre batterie, si vous utilisez un powerpack fait au pays des kangourou (Enertion)… il y a une valeur spécifique du regen afin de ne pas surcharger le pack; bref, vous avez juste à mettre les valeurs données par Jason. Rien de bien fou !
Bon ride