Cette rubrique à pour but de permettre à chacun de vous d’apprivoiser ce nouveau vario qui peut faire peur au premier abord et de répondre aux questions que l’on peut se poser.
Il sera divisé en plusieurs rubriques pour plus de clarté et évoluera au fils du temps pour permettre à un non initié de pouvoir s’en sortir
il n’y aura pas de discussion sur ce topic pour qu’il ne fasse pas 40 pages, se sera juste une banque information sur le VESC
bien sûr il sera évolutif sur vos propositions et vos remarques
VOICI QUELQUES RECOMMANDATIONS AVANT TOUTE UTILISATION "par batou " Histoire d’apporter ma pierre à l’édifice et parce que je vais pas tarder à plonger dedans, voici quelques remarques/mises en garde sur le VESC proposées par Onloop (Enertion) sur son forum electric-skateboard.builders. Je les traduis (à peu près) en français pour ceux qui seraient fâchés avec l’anglais :
IMPORTANT : recommandations de sécurité relatives au VESC
Le VESC n’est pas un produit fini ! C’est une version BÊTA.
La carte électronique est livrée sans protection/boitier. Elle peut s’abimer très facilement.
Avant son utilisation, il est recommandé d’installer le VESC dans un boitier, ou d’utiliser une gaine thermorétractable
Une fois sous tension, des courts circuits peuvent apparaitre si le VESC entre en contact avec n’importe quel matériau conducteur (y compris de la fibre de carbone)
Les décharges électrostatiques (ESD) peuvent endommager le VESC
Il est recommandé d’installer un fusible entre le VESC est la source de courant (batterie) pour éviter les courts circuits (je pense plutôt que c’est les sur intensité qui sont évitées)
Lors de la configuration du VESC : détection des moteurs, ajustement des paramètres dans le BLDC tool, il est recommandé d’utiliser une source basse tension et basse intensité. Ici il parle d’une alim de type « labo » ou de type « ordinateur portable » (12-20V et 3-5A)
Avant de toucher quoi que ce soit dans le BLDC tool ne pas oublier de faire des sauvegardes de la configuration par défaut
Le VESC est livré sans instruction ! Il est de votre responsabilité de trouver les informations.
Utiliser le VESC avec précaution.
Le discours peu paraitre un peu alarmiste, mais je pense qu’Onloop a du avoir pas mal de demande de retour pour des VESC qui ont cramé à cause de mauvaises manips (d’où la mise en garde). Il faut surtout pas que ça nous décourage d’utiliser ce superbe ESC! A priori, si on suit les recommandations il ne devrait pas y avoir trop de problèmes.
Assembler les cables d’alimentation chaque VESC positif entre eux et négatifs entre eux afin d’avoir deux cables en Y qui aillent vers la source d’alimentation (batterie)
Relier les fils moteurs de chaque VESCs à chaque moteur
Branchez votre cable PPM du VESC ID 0 à votre récepteur
Identifier avec un stylo ou marqueur chaque VESC afin de ne pas vous planter. Marquez ID 1 (SLAVE) et ID 0 (MASTER)
Vérifier bien vos branchements et isolez bien chaque VESC et chaque cables (alim, moteur etc)
Ne pas connecter le CANBUS pour le moment
Ne mettez aucune charge sur vos moteurs (en somme ne relier aucune courroie ni rien, moteur à vide)
Branchez le cable USB au VESC ID 0
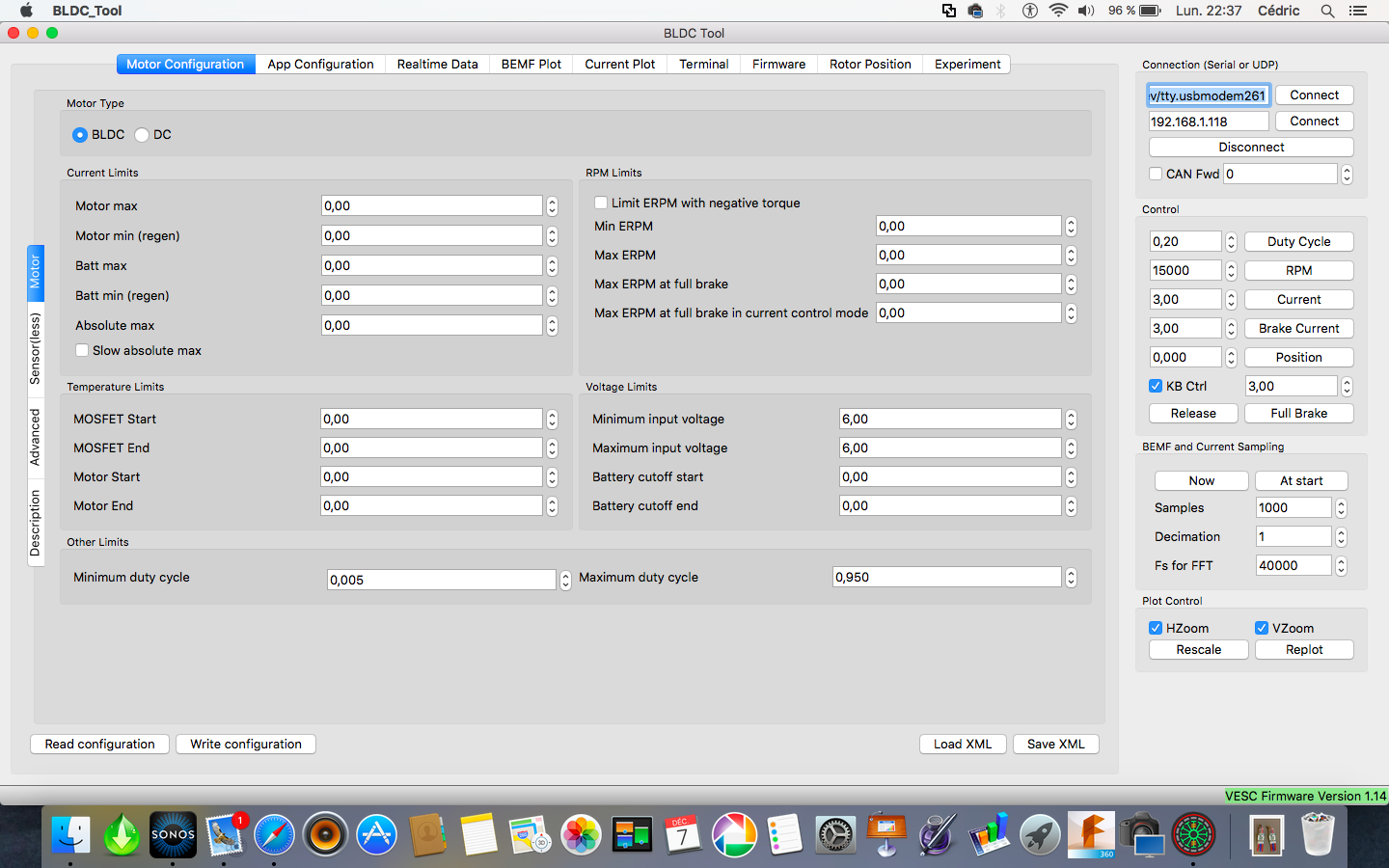
Lancez BLDC Tool qui correspond à votre firmware (ici 1.14 pour moi)
Branchez votre batterie, votre récepteur doit s’allumer, vos VESC aussi.
Changer l’adresse de connection de votre port afin de pouvoir vous connecter au VESC pour le programmer (chez moi /dev/tty.usbmodem261 est par défaut et cela fonctionne)
Cliquez sur Connect et vous devriez avoir en bas écrit…Connected (youpi!)
Passons maintenant à la configuration du VESC ID 0 (MASTER)
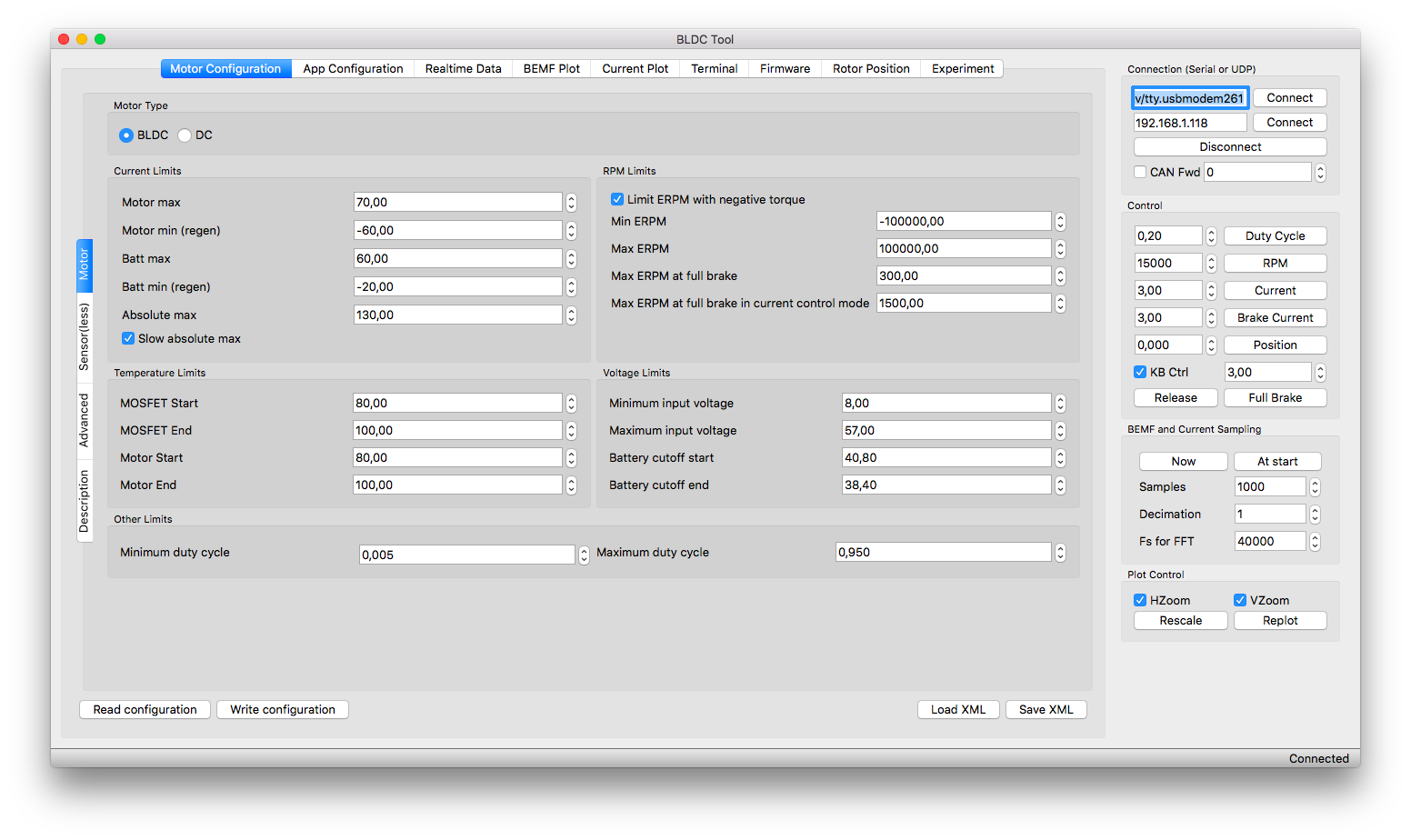
Cliquez sur READ CONFIGURATION (afin de charger la configuration - à faire quand vous allez dans les onglets pour éviter de modifier une conf qui n’est pas celle chargée)
Changer la valeur Current Limits/Motor Max par celle de votre moteur (ici moi c’est 70A)
Modifiez les quatre valeurs Voltage Limits afin de régler votre voltage maximum (j’ai mis 57V car je suis en 12S sinon il affiche un message fault de type overvoltage) et votre voltage min en input. Puis réglez les valeurs du LVC (Low Voltage Cutoff), en somme… la sécurité de vos lipos. Mon cut off démarre à 3.4V x 12 = 40.80 et s’arrête à 3.2V x 12 = 38.40. Pas compliqué !
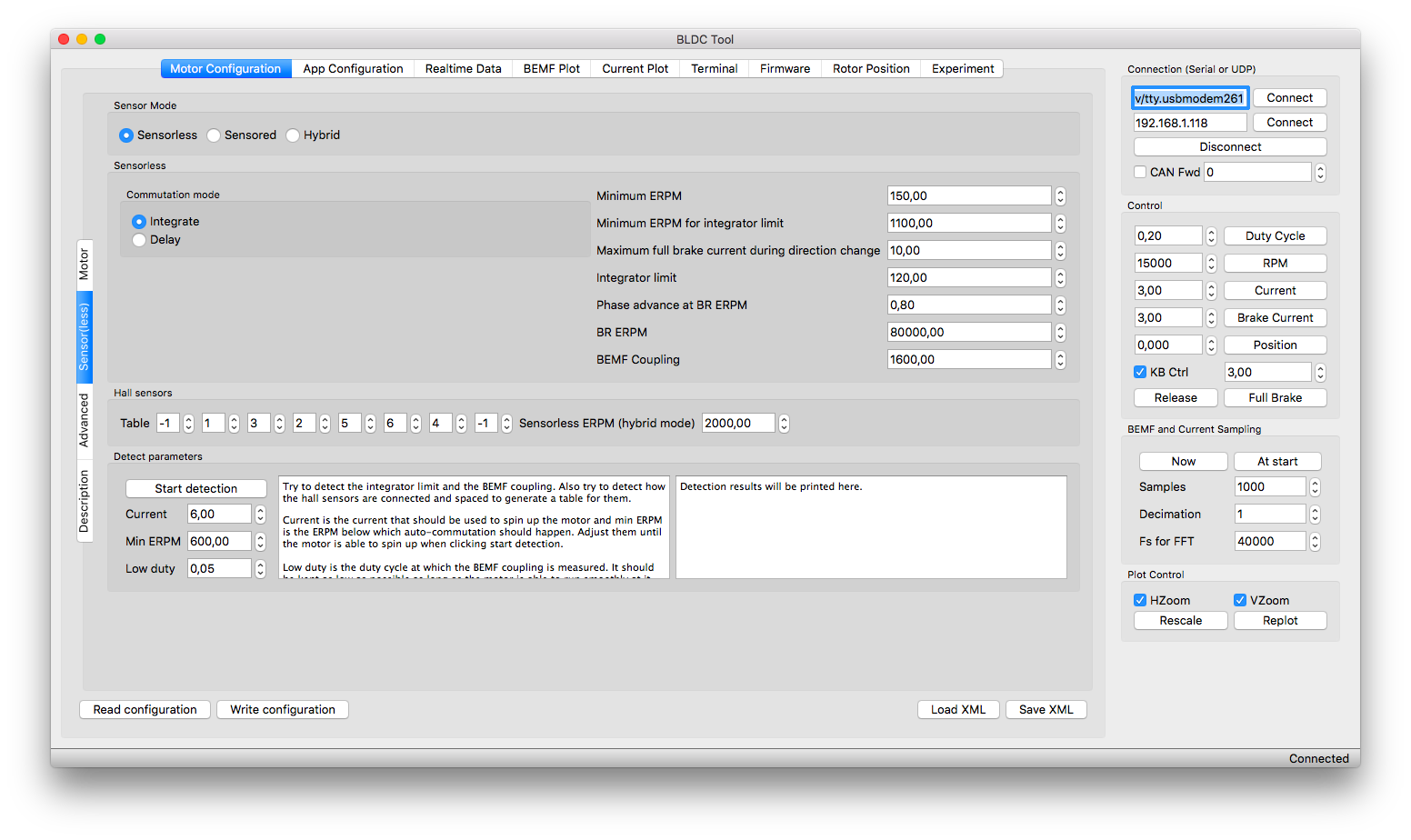
Allez dans l’onglet Sensor(less)
Cliquez sur READ CONFIGURATION
Cliquez sur START DETECTION, votre moteur va tourner et il va vous donner les valeurs INTEGRATOR LIMIT et BEMF COUPLING à mettre (il vous faut les arrondir à 5 et à 100). Moi cela donne 120 en integrator et 1600 en BEMF COUPLING
Cliquez sur WRITE CONFIGURATION
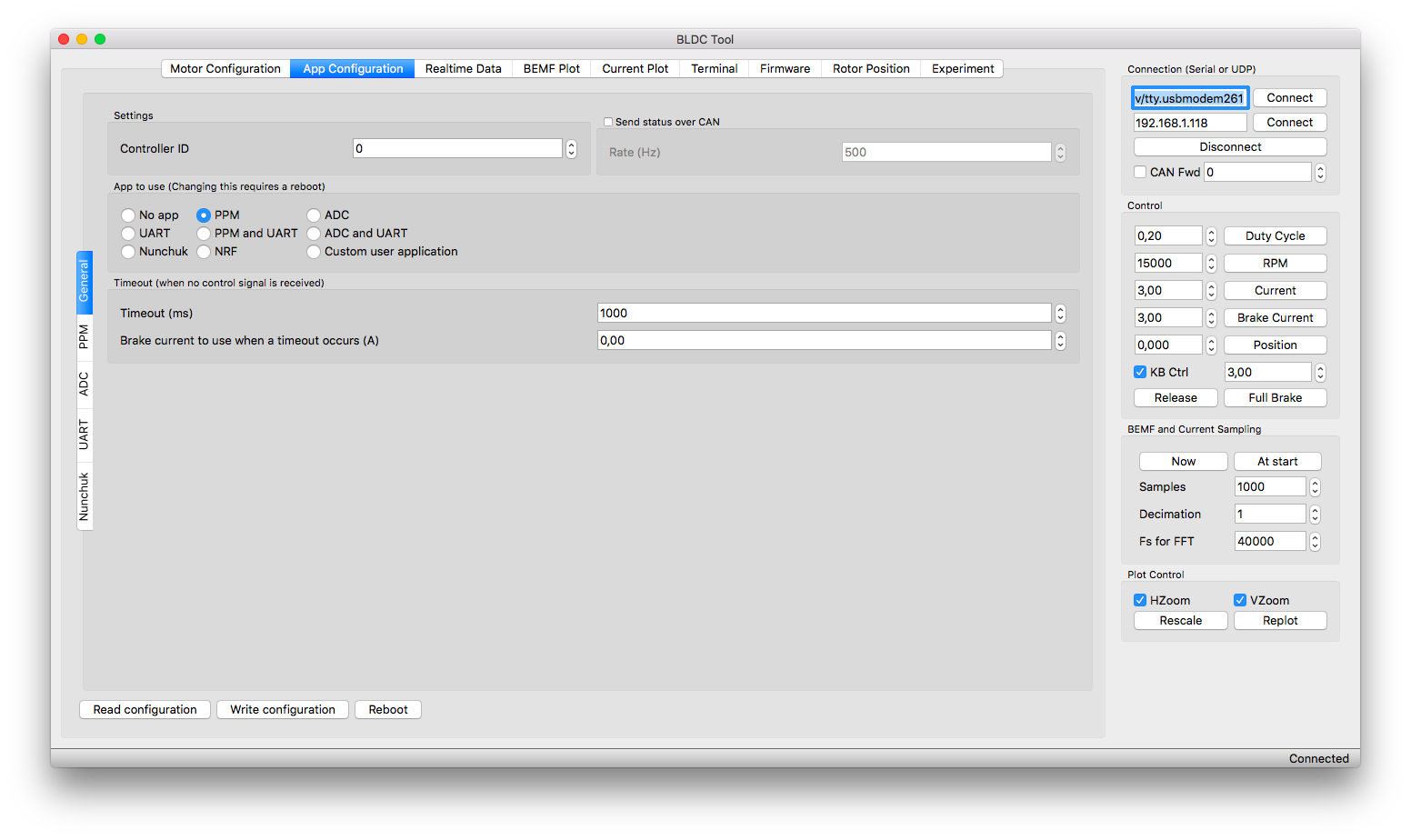
Allez dans l’onglet App Configuration et dans la partie Général
Cliquez sur READ CONFIGURATION
Controller ID à mettre à 0 (c’est le master n’oubliez pas)
NE PAS COCHER Send status over can (on le fera sur le SLAVE uniquement)
Cocher PPM
Cliquez Write configuration
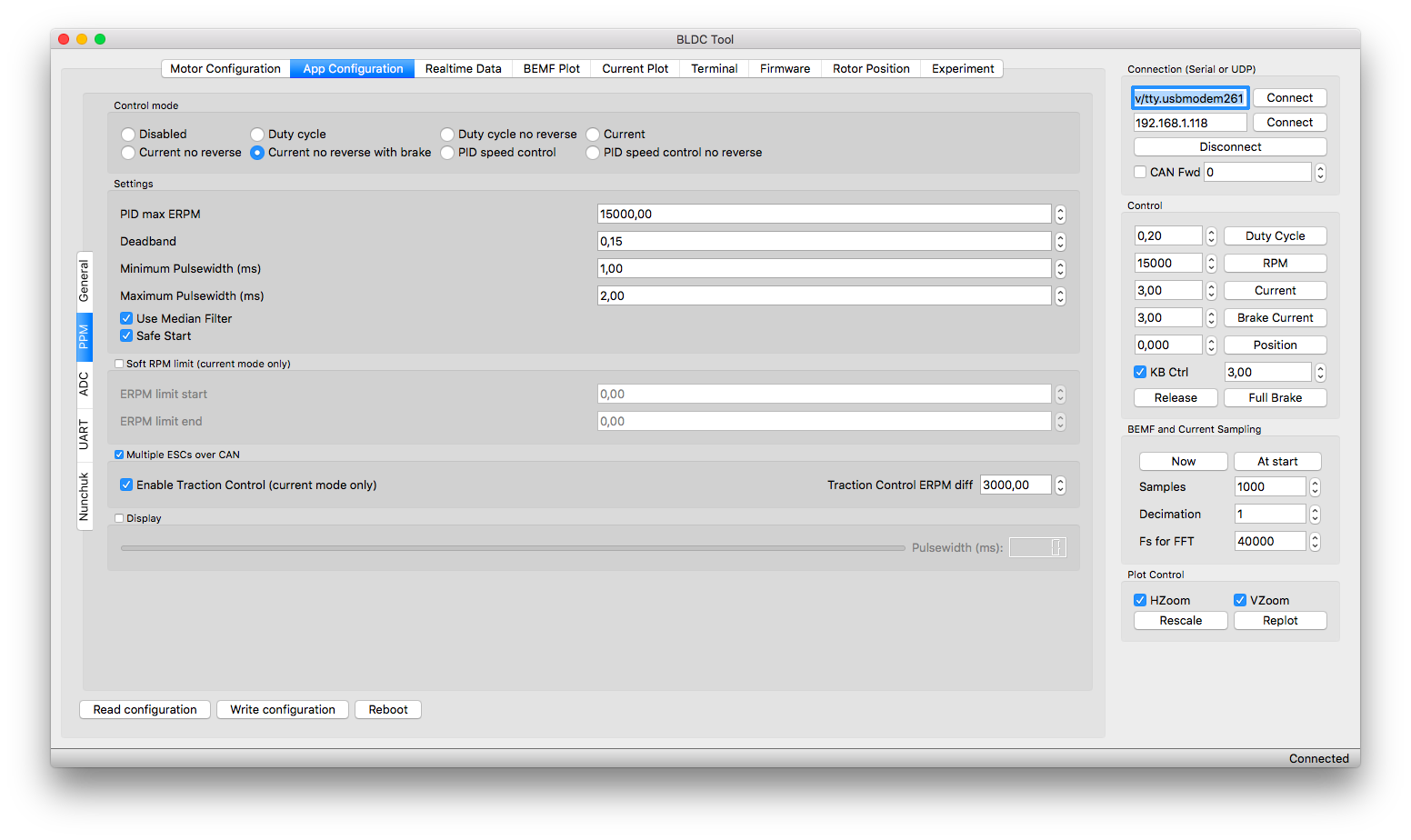
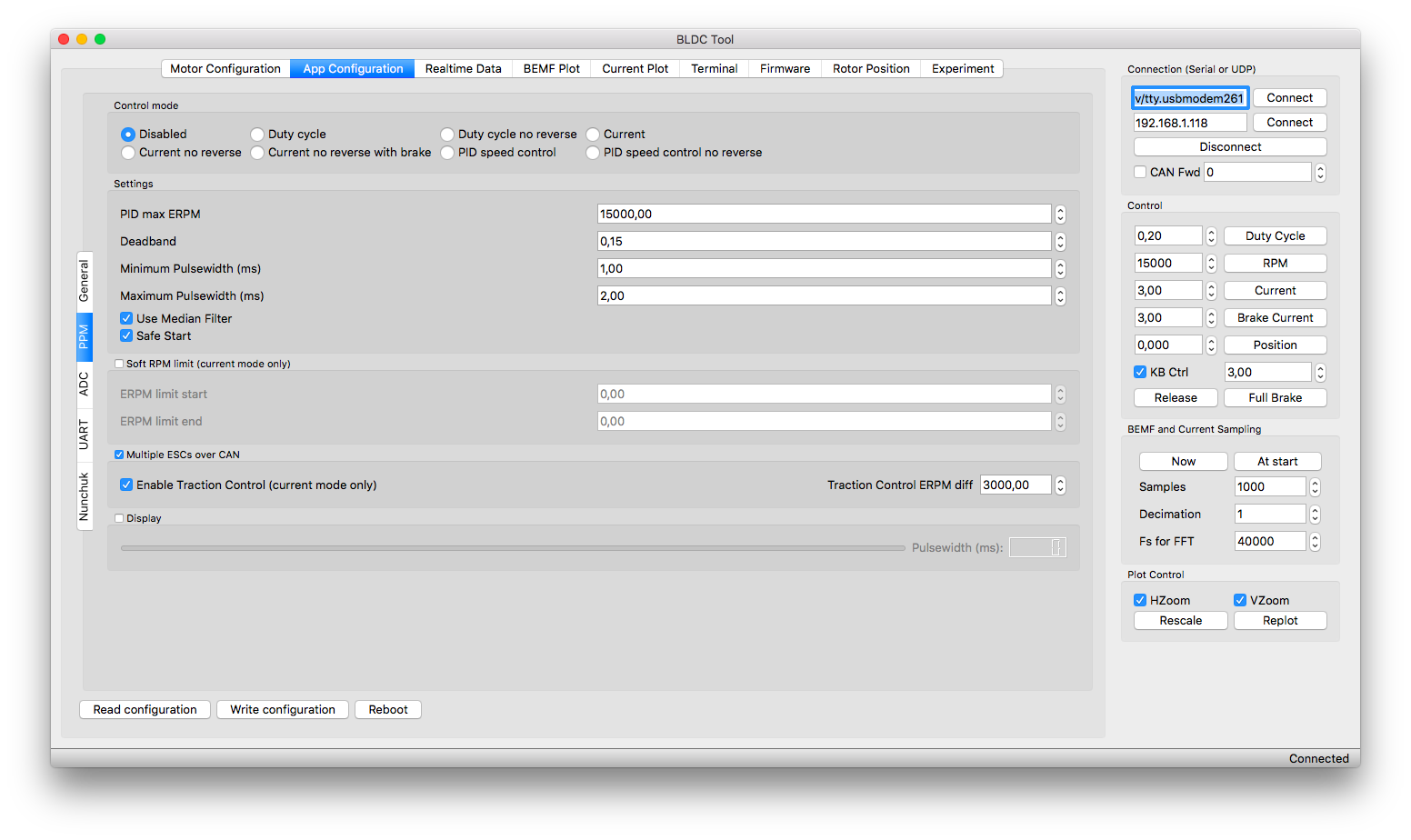
Dans l’onglet PPM, cocher current no reverse with brake, cocher Multiple ESCs over CAN et ENABLE TRACTION CONTROL
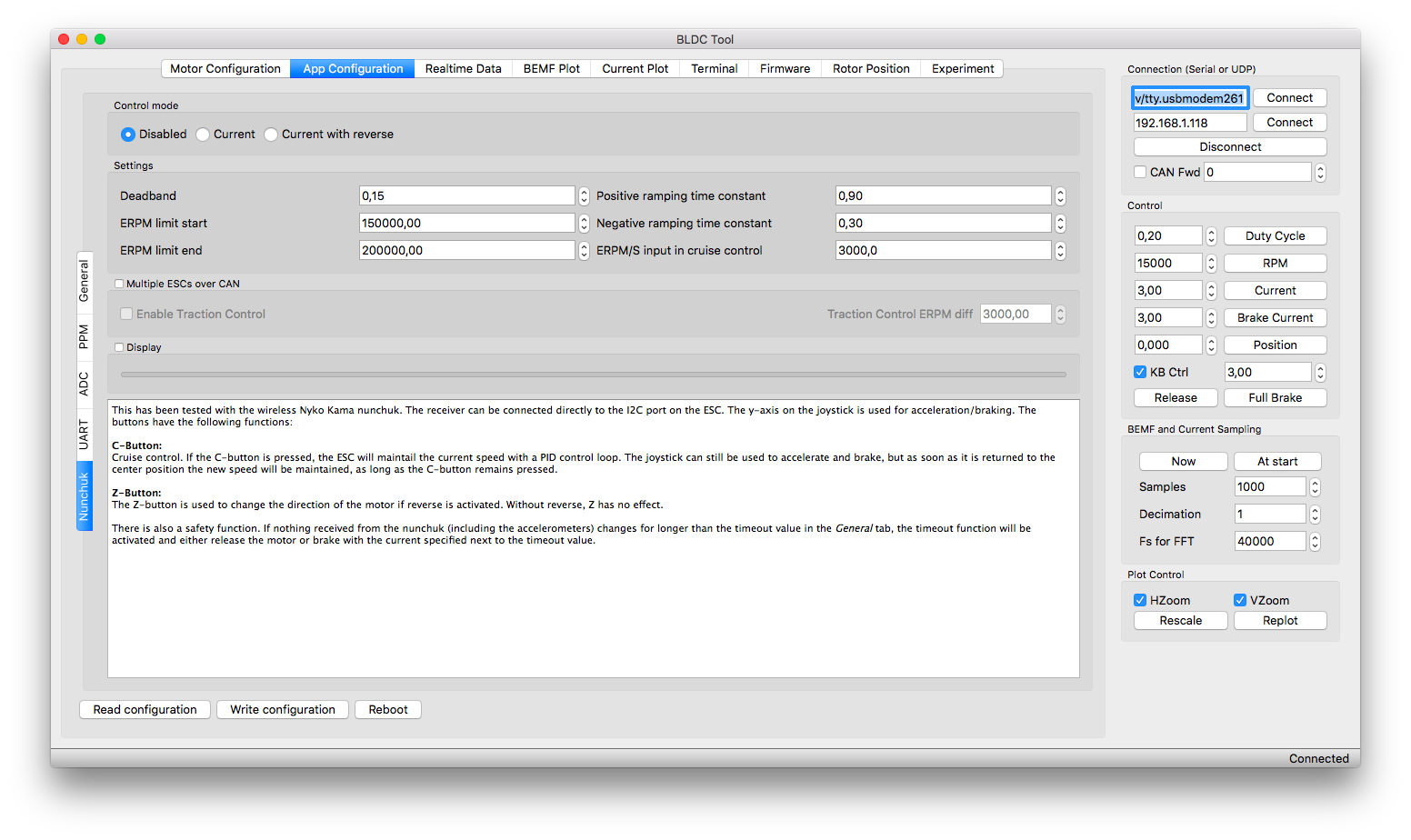
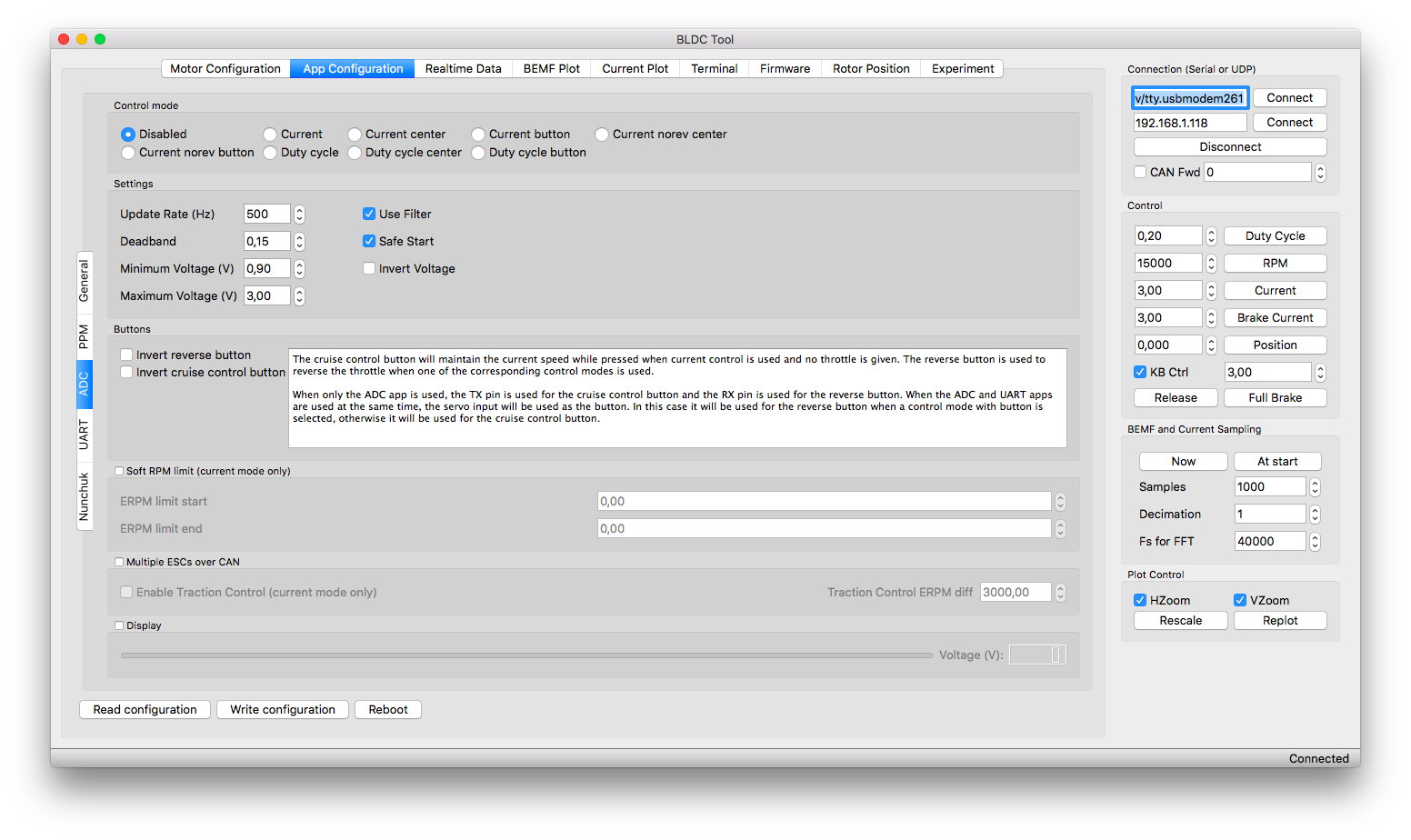
Vérifier que dans l’onglet ART et Nunchuck, le control mode est à disabled (normal vous utilisez le PPM !)
Cliquez WRITE CONFIGURATION
Bravo, c’est presque fini !
Allons direct à la configuration du SLAVE (ID 1) qui recevra ses instructions via le CANBUS que vous connecterez plus tard.
Brancher le cable USB sur l’autre VESC
Cliquez Connect
Cliquez sur READ CONFIGURATION (afin de charger la configuration - à faire quand vous allez dans les onglets pour éviter de modifier une conf qui n’est pas celle chargée)
Changer la valeur Current Limits/Motor Max par celle de votre moteur (ici moi c’est 70A)
Modifiez les quatre valeurs Voltage Limits afin de régler votre voltage maximum (j’ai mis 57V car je suis en 12S sinon il affiche un message fault de type overvoltage) et votre voltage min en input. Puis réglez les valeurs du LVC (Low Voltage Cutoff), en somme… la sécurité de vos lipos. Mon cut off démarre à 3.4V x 12 = 40.80 et s’arrête à 3.2V x 12 = 38.40. Pas compliqué !
Allez dans l’onglet Sensor(less)
Cliquez sur READ CONFIGURATION
Cliquez sur START DETECTION, votre moteur va tourner et il va vous donner les valeurs INTEGRATOR LIMIT et BEMF COUPLING à mettre (il vous faut les arrondir à 5 et à 100). Moi cela donne 120 en integrator et 1600 en BEMF COUPLING
Cliquez sur WRITE CONFIGURATION
Et oui, comme ici on a paramètré les valeurs de voltage et de moteur… c’est pareil il faut mettre les même que sur le VESC ID 0 (MASTER)
Maintenant cela va changer… mais c’est presque fini !
Allez direct dans l’onglet App Configuration
Cliquez sur READ CONFIGURATION
Changer le controller ID à mettre 1 (normal c’est le MASTER)
Cocher Send status over CAN
Cocher sur No App afin de désactiver cette option car il n’y en a pas besoin sur le SLAVE
Désactivez le PPM, ADC, Nunchuck (Disable) car comme déjà dit… il n’y a pas besoin de paramétrer de communication à part le CANBUS
Et c’est fini !
Débranchez votre cable USB, votre cable de batterie
connectez votre cable CANBUS entre les deux VESC (les deux pin du milieu sur chaque VESC)
allumez votre émetteur
alimentez via la batterie…
attendez 2 secondes … et mettez un coup de gachette… et écoutez le son des VESCs.
Bravo… vous verrez le plus difficile est de le faire une fois; ensuite vous optimiserez les paramètres tel que le startup boost (ne jamais dépasser 0,090)
PS: faites attention à votre batterie, si vous utilisez un powerpack fait au pays des kangourou (Enertion)… il y a une valeur spécifique du regen afin de ne pas surcharger le pack; bref, vous avez juste à mettre les valeurs données par Jason. Rien de bien fou !
INSTALLATION LOGICIEL ET DÉTECTION DU VESC (pour Windows)
1- Télécharger le ici BLDC tool qui permet de configurer le VESC. Bien sélectionner la version qui correspond au firmware installé.
2- Installer le « bldc-tool-windows-driver ». Il permet de « créer » des ports COM pour communiquer avec le VESC
3 - Extraire le répertoire « bldc-tool-windows » là où vous souhaitez. Le BLDC tool ne nécessite pas d’installation « classique ». Il suffit de double cliquer sur le *.exe dans le répertoire pour lancer le programme.
4- Connecter le VESC au PC avec un câble USB. Attention il semblerait qu’utiliser un câble trop grand peu poser des problèmes de connexion. Normalement l’ordinateur reconnait immédiatement l’ESC et vous l’indique par une petite fenêtre en bas à droite de l’écran (classique pour les nouveaux périphériques).
5 - Il est maintenant nécessaire de connaitre le numéro du port COM auquel il est affecté. Pour cela utiliser : menu démarrer/panneaux de configuration/système/gestionnaire de périphériques. la fenêtre suivante apparait :
Normalement le VESC correspond à « STMicroelectronics Virtual COM Port ». Repérer le numéro du port (sur la photo il s’agit du COM8)
6 - Lancer le BLDC tool :
Au lancement, le BLDC tool n’est pas connecté au VESC (status : « not connected »). Si nécessaire, modifier le numéro du port COM dans le cadre rouge et cliquer sur « Connect ». Le statut affiche en vert la version du firmware puis prend la valeur « Connected »
Mon vesc approchant de ma boite au lettre, je commence a regarder un peu comment le programmer et je suis tomber sur le tuto vidéo d’okp.
Il est toujours d’actualité ?
Salut paufred64,
merci infiniment pour ton tuto.
j’ai téléchargé et installer BLDC, j’essaye maintenant de connecter le VESC. okp dit qu’il faut “- Changer l’adresse de connexion de votre port afin de pouvoir vous connecter au VESC pour le programmer (chez moi /dev/tty.usbmodem261 est par défaut et cela fonctionne)”
Je ne parviens pas à réaliser cette étape. Je clic sur le bouton connexion UDP (pour changer l’adresse) et aucune case apparaît, au-dessus de (192.168.1.118) comme son impression d’écran.
Je me plante complètement ? Help
oui au moment d’installer le driver, tu dois pouvoir voir le port com correspondant et tu dois le retrouver dans le panneau de config (sous windows, sous la pomme je ne sais pas comment ca marche ) COM 8 chez moi!
Je pense avoir compris le problème, j’ai un double VESC de chez Aliensystem.
J’ai changé le COM4 en ayant bien regardé si mon port dans les périphériques est identique, mais la connexion ne ce fait toujours pas dans BLDC.
Il me faut peut-être un autre logiciel que BLDC pour que sa marche ? (je découvre…)
merci pour vos réponses les e-sk8









 il faut mettre les même que sur le VESC ID 0 (MASTER)
il faut mettre les même que sur le VESC ID 0 (MASTER)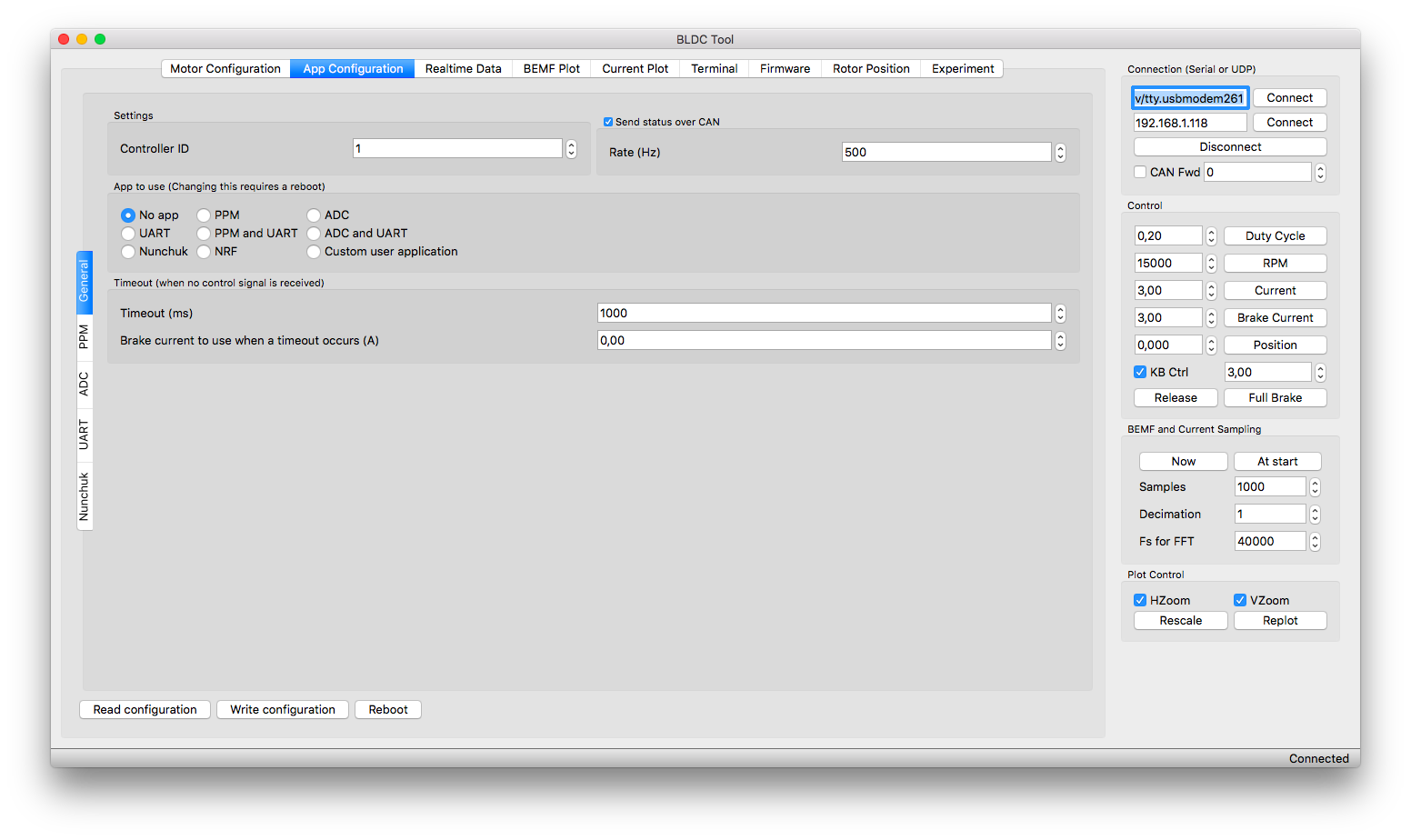







 ) COM 8 chez moi!
) COM 8 chez moi!

{kind=link}