Ça va faire marrer @lurch mais pour mon eFoil j’ai laissé tomber les VESC et je suis passé en ESC . Ok pas de VESC tool et le truc communique avec toi par des bips ![]() … mais franchement le truc fait tout tout seul détection moteur, remote …une sorte de Linguy puissant pour aller sur l’eau
… mais franchement le truc fait tout tout seul détection moteur, remote …une sorte de Linguy puissant pour aller sur l’eau ![]()
1 « J'aime »
en Efoil , un esc basique suffit c sur .merci l’inertie de l’eau …
en skate , il faut un certain feeling et sensibilité pour rester dessus et pas se crouter.
@cathode tu dis ce sont les même . visuellement ?
firmware ? mosfets , drivers ? sur esc , beaucoup de calculs ,mesures et décisions stratégiques sont basées sur la fenetre de tir des Ton et Toff des mosfets , et ça varie beaucoup d’un composant à l’autre …
Lurch sait bien que je suis une quiche en électronique (j’ai regretté la simplicité des moteurs à balais devant lui…) mais quand je lis tous les problèmes avec les Vesc, pourtant après plusieurs années de fiabilisation, je me demande si le truc n’est pas « over-engineeré ».
J’ai l’impression que le Vesc a été conçu pour piloter des moteurs de drones, au quart de poil près, avec plein de réglages, mais pas pour des planches.
Comme dit au dessus, les Linguy ont l’air de faire le boulot.
Ils ne sont pas « over-injiniéré », loin de là, je rappelle que les premiers 4.12 était une simple carte vitale avec 3 condos, un DRV, un STM325 et 6 mosfetts, c’etait suffisant pour s’imposer comme le nouveau standard. C’est juste qu’en tant que machines opensource il y a clairement des gradients de qualité selon les fabricants et pour le coup avec makerbase et flipshit, on est au niveau 0 (au moins makerbase s’en cache pas et le prix est excellant).
Evidement que ce n’est pas parfait, c’est dur d’avoir un esc qui doit savoir tout faire, piloter un 0802-25000kv de tiny-whoop comme le plus énerver des qs273 full prépa statorade 30S-500A+fieldweakening en passant par les moteurs plutot moyen genre qs165 / TP120 / Sotion et les moteurs DC de merde. Il n’empêche que je préfère prendre le risque de m’emmerder la vie et assumer mon rôle de « beta testeur » que shuntmodé a l’infinie un lingy qui, d’origine, a tout juste la capacité de drivé des hubs merdique, leur fiabilité vient de là.
EDIT : je rajouterai qu’il fait faire attention aux échelles, mettre en relation les avis vesc comme lingy en fonction du nombre d’utilisateurs (à savoir trois personnes et un chat concernant la commu lingy), pour le coup je ne suis pas sûr que le ratio soit si glorieux que ca.
Je n’ai pas tout compris et je suis très heureux que des beta testeurs comme toi fassent le boulot de fiabiliser la partie électronique.
Par contre, en Esk8, on a pas besoin d’un esc qui sait tout faire.
Avec un millier de watt en comptant très large,il y a déjà de quoi se faire plaisir.
Par contre, il doit être fiable et ne pas couper par surprise…
Les VECS sont à l’évidence bien plus performants mais je ne suis jamais rentré à pied en traînant la board en Linguy ( bon c’est vrai que je me traîne à 30kph et ça me laisse le temps de regarder le paysage…![]() ) en VESC c’est la deuxièmement fois…
) en VESC c’est la deuxièmement fois…![]() ceci dit je suis d’accord c’est assez passionnant de bricoler avec un VESC même si je n’y comprends rien et que je risque de rentrer à pied une fois de plus . Les marcheurs qui ont vu la fumée sortir de ma box se sont bien marré c’est déjà ça
ceci dit je suis d’accord c’est assez passionnant de bricoler avec un VESC même si je n’y comprends rien et que je risque de rentrer à pied une fois de plus . Les marcheurs qui ont vu la fumée sortir de ma box se sont bien marré c’est déjà ça ![]()
1 « J'aime »
et ça n’a pas beaucoup evolué ?. J’ai pas eu l’occasion de dépecer des vesc récents , mais à part les A/V supérieurs et firmwares plus fournis , le principe reste le même . ça reste extrêmement souple , bien configurable , voire trop et rapidement car open source et tributaire des diverses fabrications donc bugs et subtilités diverses .
le lingyi , c’est détesté par beaucoup car mal utilisés ou du moins mal intégrés par les assembleurs ,impénétrable en programmation, mais reste hackable de manière analogique .ça fonctionne avec à peu prés tout , mais oui , peu de gens s’y intéressent .et pour ton usage , tu lui fera difficilement dépasser les 90A batterie , à moins de modifs plus lourdes ( mosfets, pistes du pcb low…)
Ça dépend :


Spintend par exemple, ne drive pas avec un DRV.
MakerX aussi, sur le fuck300.
Enfin bon j’arrête de polluer le post, en vrai, on s’en branle fortement même si pour le coup « avec quelques milliers de watts » moi je me fais juste chier ![]()
1 « J'aime »
Tu ne pollues rien du tout on apprend des trucs👍
Tu as des coupures avec le Spinted? Ça ça me fait un peu flipper avec le flipsky même avec l’armure et l’intégral ….flipper/flipsky y aurait pas un rapport ![]()
Pas pour l’instant, ça viendra ![]() ça viens toujours.
ça viens toujours.
Je manque d’expérience en Esk8 mais j’avais des Flexscoot avec un hub moteur de 1000 W et ça marchait déjà pas mal…
Surtout, quand je vois passer des cyclistes pro qui produisent moins de 500W, même dopés, je me demande tjrs où passent tous les milliers de Watt des esk8.
Cest pas trop comparable. On a des demultlications fixes qui necesssitens des fortes puissances pour avoir des bons demarrages et accel.
1 « J'aime »
Hé oui, étonnamment on parle toujours des watts, jamais de couple. 1000w ça peut être marrant mais que de 0 a 15kmh quoi ![]()
Si un cycliste peut être impressionnant avec seulement 500w ( plutôt 300 je dirais) c’est parceque il a plein de vitesses disponible et c’est précisément tout le génie du vélo. Nous… On en a une et on doit tout faire avec.
Du coup j’aurais dû dire que 1000w sous 45 kmh c’est chiant.
1 « J'aime »
C’est vrai que l’on devrait plutôt parler de couple (et d’ampérage). Et il est aussi vrai que l’aérodynamisme des cyclistes est bien meilleur.
Après, en TT, il me semble qu’une plage de vitesse entre 10 km/h et 50 km/h est déjà satisfaisante. Et pour un vieux comme moi, les planches (snow, mtb, skate) n’ont pas d’accelerateur mais seulement un peu de gravité.
Je viens de troquer ma remote VX1 contre une maytech V2 qui traînait ( au moins elle est à l’épreuve de la pluie) que j’utilise pour l’instant en ppm , ( oui je sais la honte puisque je pourrais le connecter en UART…) bon trois fil en ppm ça n’exploite pas les capacité de la remote par contre ça fonctionne. Le probleme, je suis à fond à 20% throttle …

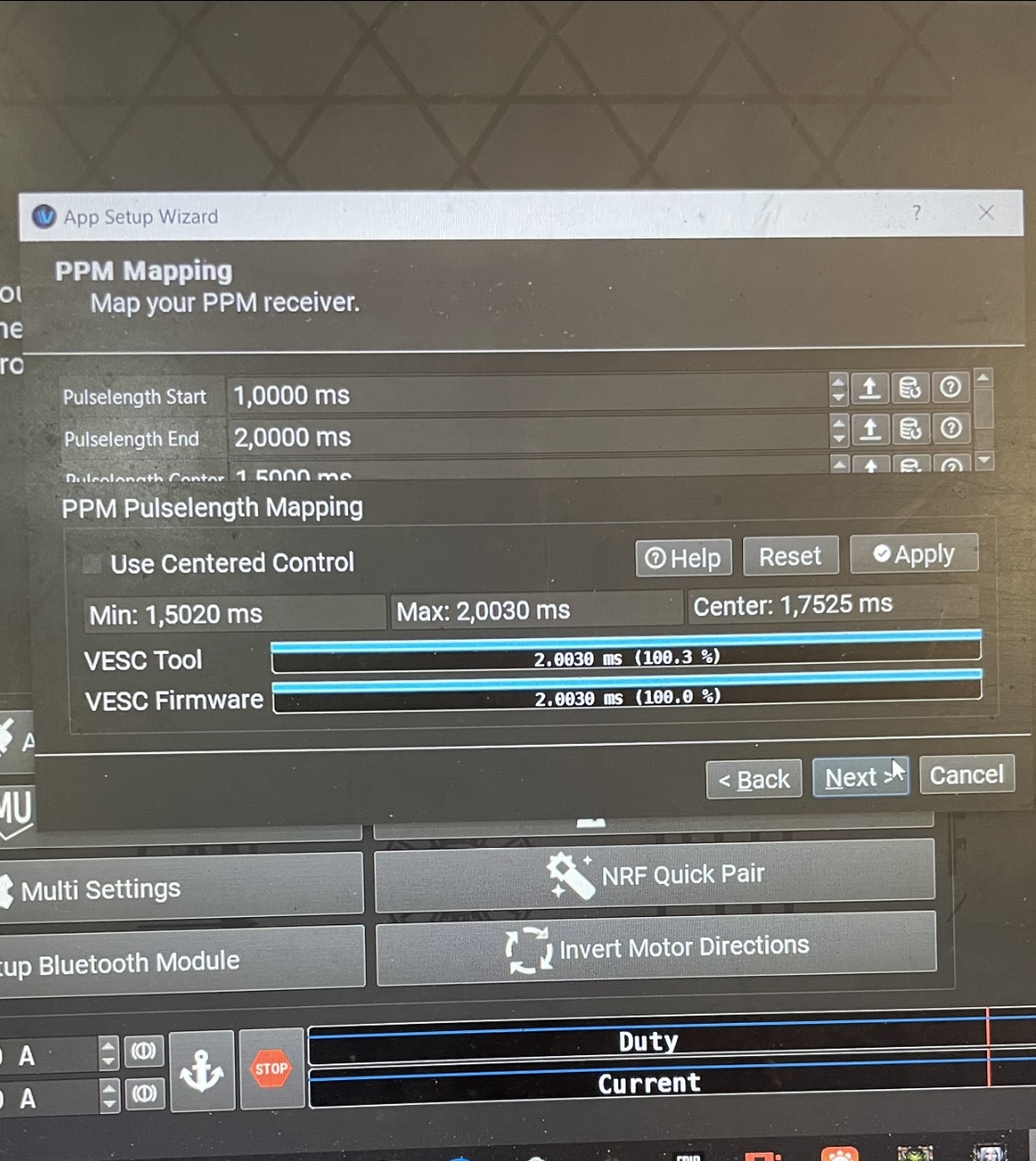
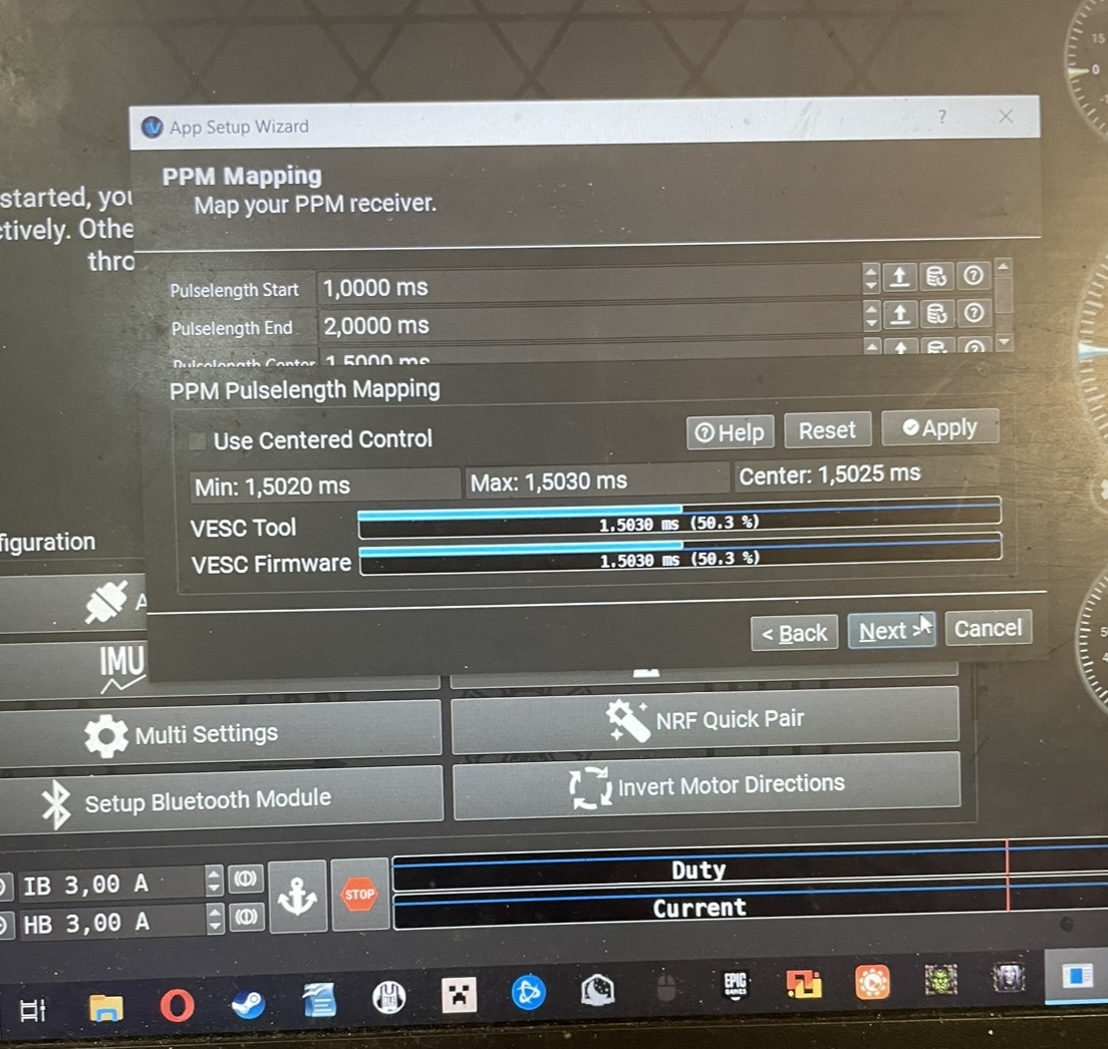
reset, ecriture, branlage de manette, ecriture, finito
Dans le wizard input ou App setting.
J’ai essayé les deux…bof
même en ppm , de mémoire le récepteur est bien foutu . tu peux brancher un fil au+ batterie et un autre à un capteur hall pour que la remote aie les infos de vitesse et batterie . y’a même un relais et un totor en open collector pour piloter ce que tu veux .
les deux sont possibles, ça revient au même.
Ouais j’ai vu ça … le problème c’est à fond à 20% de la course …